位于美国加州桑尼维尔百度研发中心在六个月前刚刚成立,主要进行人工智能、安全硬件、自动驾驶等领域的研发。试乘现场邀请到了百度 Apollo 平台的合作伙伴英伟达、AutonomouStuff、采埃孚、盼达等现场试乘交流。
美国加州桑尼维尔百度研发中心
Apollo 从1.0至1.5第一次升级,在完整封闭场地寻迹自动驾驶基础上增加了夜间识别障碍物以及非典型交通场景下的异形障碍物识别,同时提高了对决策规划、云端仿真、高精度地图、端到端深度学习的能力。这次在美国试乘的是搭载了新一代 Apollo 2.0系统的L3、L4无人驾驶方案,具备更强大的安全识别和感知能力。
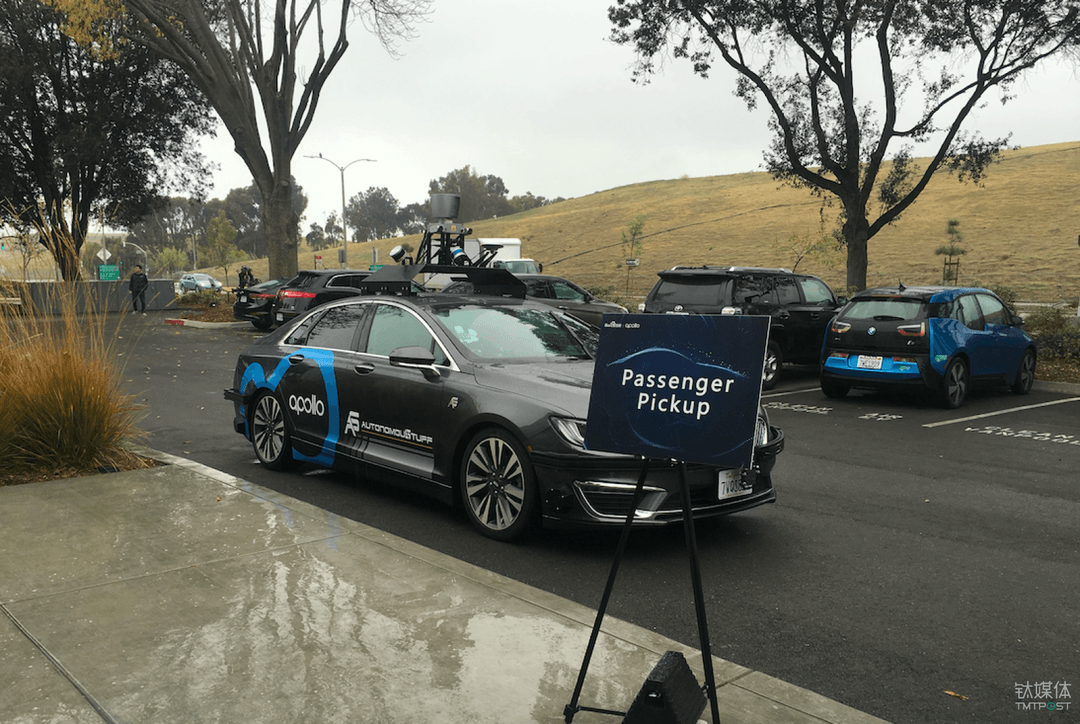
百度 L4无人驾驶汽车
第一款试乘的L4无人驾驶汽车是林肯MKZ系列,通过百度自动驾驶技术和AutonomoStuff共同合作。在传感器方面,L4无人驾驶汽车车前搭载了毫米波雷达,车顶配有Velodyne 64线激光雷达,并新增了两个摄像头,分别为长焦和短焦,用来对红绿灯进行识别。位于保险杠处安装了一个非常牢固的毫米波雷达,可在毫米波波段(1-10毫米)进行探测。后备箱处两台电脑,分别可以自由切换驾驶模式以及用于进行视觉识别。
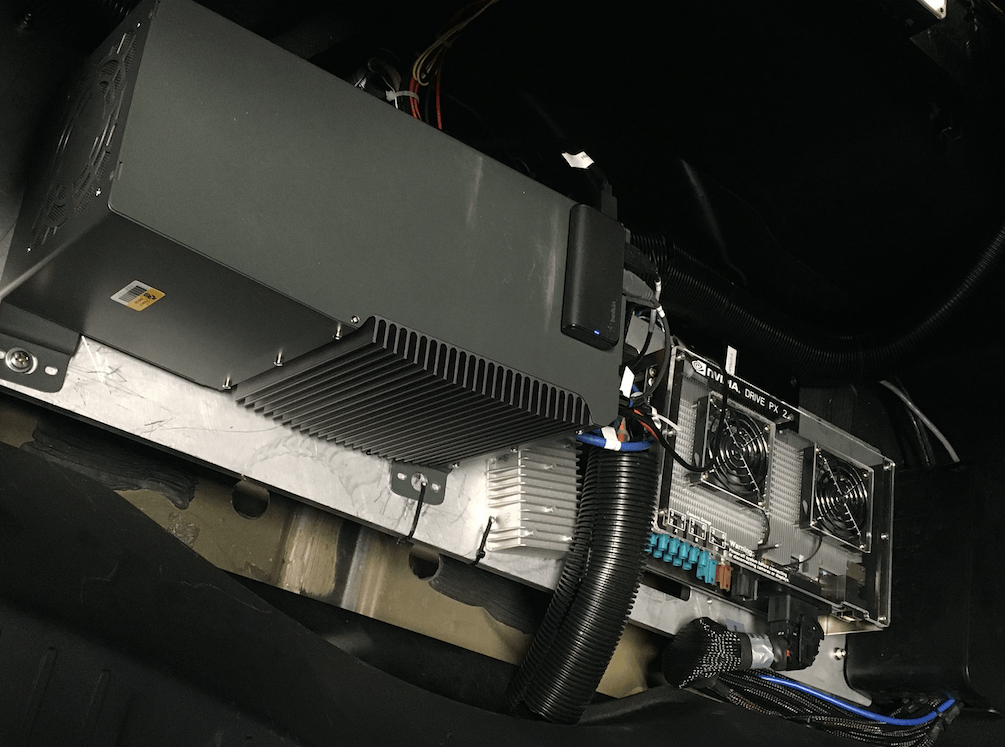
百度 L4无人驾驶汽车
试乘开始后,司机不需要任何手动操作便可直接驾驶在城市开放道路上,可以轻松完成红绿灯识别,自动变道,掉头等操作,整个试乘过程中车速保持在50km/h左右,行驶速度与公共道路上其他车辆无较大差距。
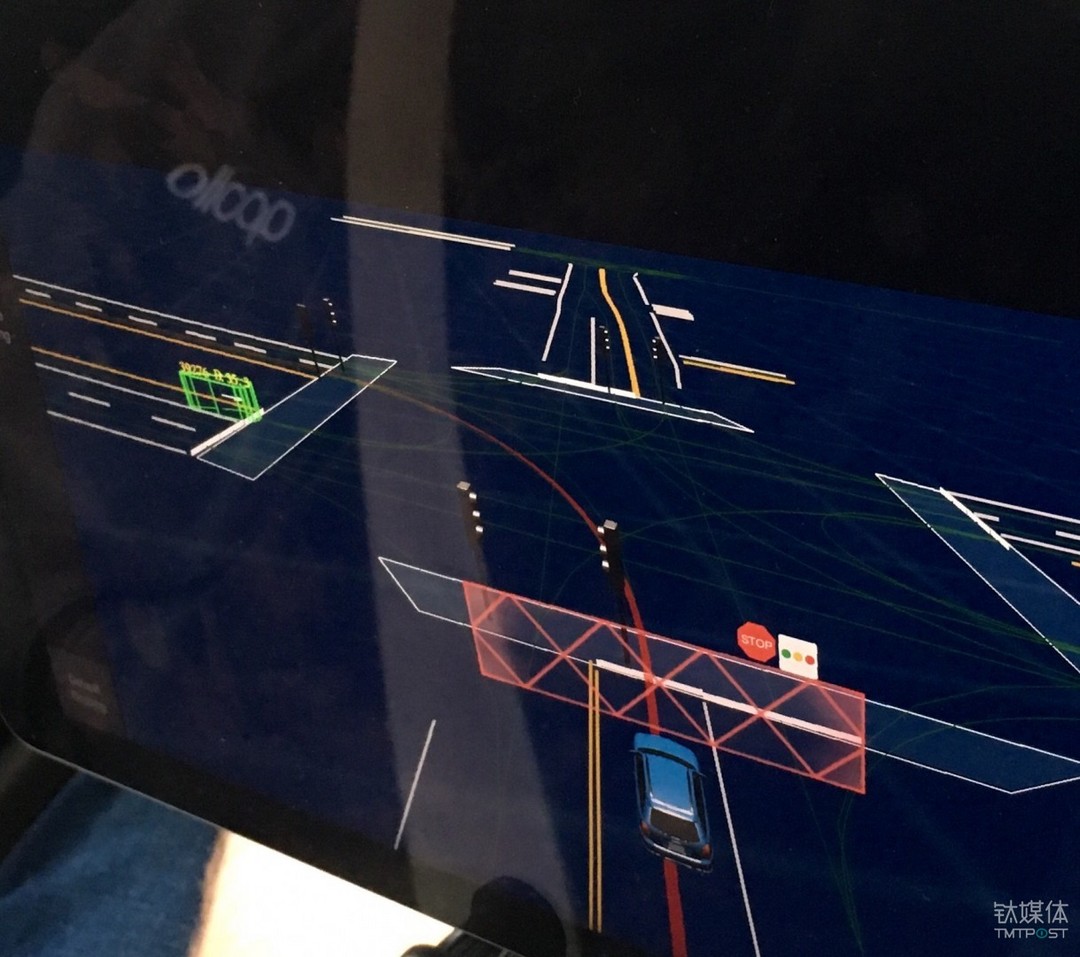
L4无人驾驶汽车实时路况监测
显示屏中的图像是试乘车辆在路口等待红绿灯左转的状态。车辆在识别到红灯后停在了红色网格(禁止驶入区域)前方进行等待,左侧的绿色方块为正在行驶中的车辆。尽管在试乘的过程中一直在下雨,但并没有影响对路况的监测,整个无人驾驶的试乘过程非常流畅。

搭载L3无人驾驶系统的力帆330EV
L3无人驾驶方案使用的车型为力帆330EV,这套无人驾驶技术的商业化应用场景将落地在力帆控股战略投资的新能源汽车分时租赁平台盼达上。与L4不同的是,这次L3的测试环境是在百度美国园区内的封闭道路上,可以实现自动出库和自动泊车等功能。
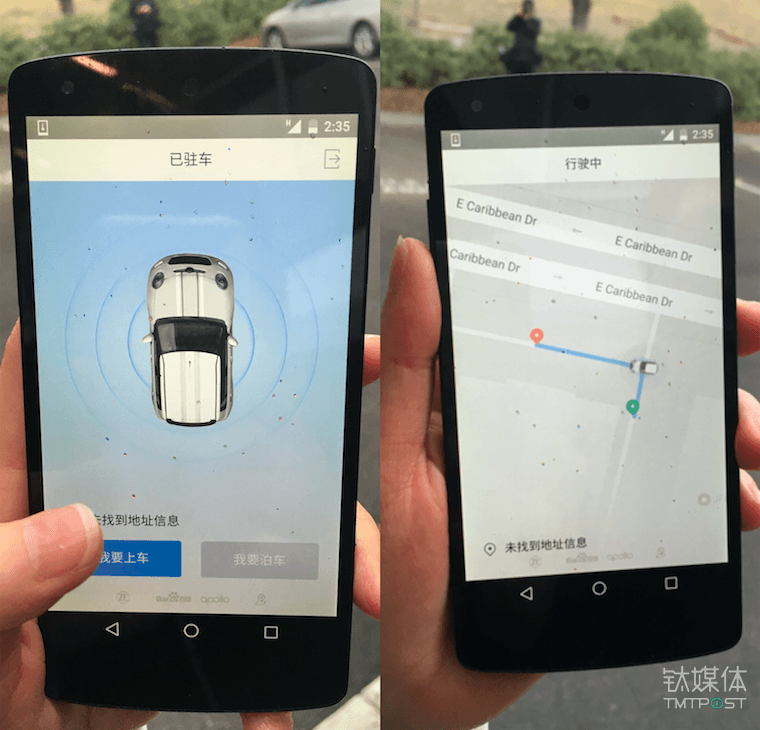
搭载百度L3无人驾驶系统,通过APP设置进行自动出库
在试乘过程中,百度工作人员向钛媒体记者展示了自动出库的过程。点击我要上车,L3级无人驾驶车辆自动从车库出发,驶向定位的上车地点。上车之后,根据已规划的路线可以进行自动驾驶,若检测到行人以及车辆,会紧急刹车或避让。在驶抵到达地点后,可以通过自动泊车功能将汽车自动驶入停车位。

坐在驾驶室的百度工作人员双手扶窗示意完全自动的泊车功能
美西时间1月8日下午2:00,百度将会美国拉斯维加斯召开新闻发布会,正式发布Apollo 2.0版本,钛媒体记者会在现场,详细解读Apollo自动驾驶开放平台全线产品。
来源:钛媒体
本文地址:https://www.d1ev.com/news/jishu/60807
以上内容转载自钛媒体,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号