盖世汽车讯 据外媒报道,特斯拉(Tesla)已开始推出新的全自动驾驶(FSD)Beta软件更新(2022.12.3.10)。此次更新是基于其车队中250,000多个培训视频片段做出的改进。FSD Beta可使特斯拉汽车能够自动驾驶到汽车导航系统中输入的目的地,但驾驶员需要随时保持警惕并准备好接手控制。
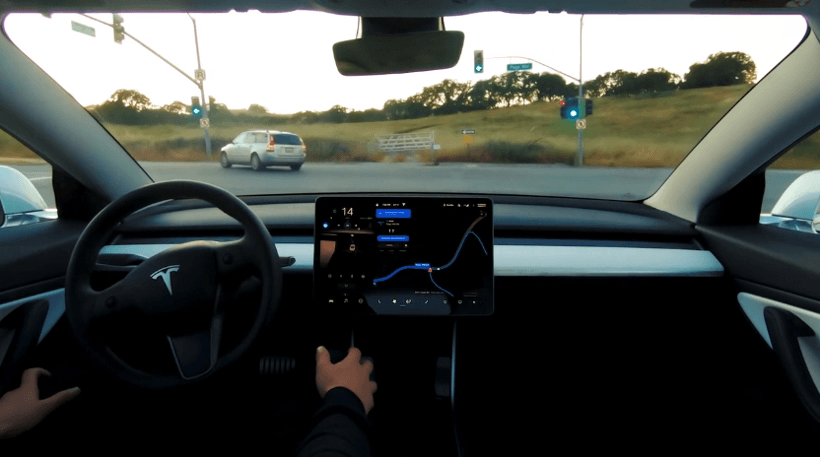
图片来源:特斯拉
虽然FSD称之为全自动驾驶系统,但由于特斯拉车辆仍需要驾驶员控制,该系统仍然是L2级驾驶员辅助系统,一旦出现事故,责任方为驾驶员而非特斯拉。由于部分更新在驱动力方面出现了后退,所以自动驾驶领域出现了“前进两步,后退一步”的发展形式。
特斯拉一直在频繁发布FSD Beta计划的新软件更新,并为其添加更多用户。目前约100,000名特斯拉车主参与了该项特斯拉计划,并且未来还会有更多人参与其中,预计将有更多数据来训练其神经网络。
根据此次更新的发布说明,此次更新是迄今为止最大的一次。有趣的是,特斯拉首次透露了从车队中提取并用于训练某些新行为的视频片段的数量。特斯拉称此次更新的训练集中总共使用了250,000多个新视频片段。
FSD BETA v10.12发行说明:
升级了无保护左转的决策框架,通过添加更多塑造走/不走决策的特征,更好地建模对象对自我行为的反应。这不仅增加了对噪声测量的鲁棒性,同时在安全范围内对决策更具粘性。该框架还可在必要时利用中间安全区域在大转弯处进行操控,并在需要安全退出交叉路口时通过控制提速。
使用更准确的车道几何形状和更高分辨率的遮挡检测来改进怠速,以提高能见度。
通过在车道选择过程中与目标未来预测更好地整合,减少不舒服转弯的情况。
升级后的规划器减少了对车道的依赖,从而能够在受限空间外顺利进行操控。
通过改进车道神经网络的架构,显著提高了交叉车道的召回率和几何精度,从而提高十字路口转弯安全性。
通过向训练集中添加180,000个视频片段,提高了所有车道产品的召回率和几何精度。
通过更好地与车道结构整合并改善黄灯行为,减少交通管制相关的错误减速。
通过在广义静态障碍物网络中添加混合/耦合层,提高了道路边缘和线路预测的几何精度。
通过使用来自自动标记器的改进数据重新训练广义静态障碍物网络,并添加30,000多个视频片段,提高几何精度和对可见性的理解。
通过向训练集中添加新的模拟和自动标记数据,提高了摩托车的召回率,减少了附近行人和骑自行车的人的速度误差,并减少了行人的航向误差。
通过向训练集中添加41,000个视频片段,提高了车辆“停放”的精度。解决了10.11遥测捕获48%的故障案例。
通过使用自动标记器中改进版本的神经网络重新生成数据集,从而提高对远处交叉物体的检测召回率,进而提高数据质量。
在打开车门的汽车周围进行操控时改进偏移行为。
通过将其升级为网络预测任务,改进了非VRU对象的角速度和以车道为中心的速度。
通过更紧密地整合引导车辆未来运动预估和计划车道变换曲线,提高了在突然减速车辆后面变换车道时的舒适度。
增加了对所有移动物体的网络预测加速度的依赖,而之前只有纵向相关的物体。
更新了附近的车辆资产,可视化指示车辆何时打开车门。
通过移除三个传统神经网络,系统帧速率提高了每秒1.8帧。

来源:盖世汽车
作者:刘丽婷
本文地址:https://www.d1ev.com/news/jishu/175582
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号