盖世汽车讯 尽管机器人没有视网膜,但光学相干断层扫描(OCT)机器可以帮助它们更自然、更安全地观察世界,并与世界互动。目前,许多机器人公司正将激光雷达集成到传感器中。激光雷达的工作原理与雷达类似,但其使用的是激光产生的短脉冲光,而非发射宽带无线电波并寻找反射信号。
(图片来源:https://wraltechwire.com/)
然而,传统的飞行时间激光雷达存在许多缺点,难以用于许多3D视觉应用。由于其需要探测非常微弱的反射光信号,很容易受到其他激光雷达系统或环境中阳光的干扰。此外,其深度分辨率也有限,如密集扫描高速公路或工厂车间等大片区域时,可能需要很长时间。为了应对这些挑战,研究人员正转向研究调频连续波(FMCW)激光雷达。
据外媒报道,杜克大学(Duke)研究团队展示了从OCT研究中学习到的技巧,可将以往的FMCW激光雷达数据吞吐量提高25倍,同时仍能实现亚毫米深度精度。该校研究人员展示了新的激光雷达方法,可以快速处理数据,从而捕捉对于自动驾驶汽车和制造系统而言至关重要的特征。
杜克大学博士生Qian Ruobing表示,“FMCW激光雷达与OCT具有相同的工作原理,生物医学工程领域自20世纪90年代初以来一直在发展。但30年前,没有人知道自动驾驶汽车或机器人会成为现实,所以OCT技术专注于组织成像。现在,为了让其在其他新兴领域发挥作用,我们需要利用其超高分辨率来获得更远的距离和更快的速度。”
OCT是一种光学模拟超声波,其工作原理是将声波发送到物体上,然后测量它们返回的时间。为了计算光波的返回时间,OCT设备测量它们的相位与经过相同距离但没有与另一物体相互作用的相同光波相比,发生了多少位移。
FMCW激光雷达采用类似的方法,并进行调整。该技术发出的激光束在不同频率之间不断变换。当收集光来测量其反射时间时,探测器可以区分特定的频率模式和其他光源,这使得其可以在各种照明条件下高速工作。FMCW激光雷达测量不受阻碍的光束的任何相移,是一种比目前的激光雷达系统更精确的确定距离的方法。杜克大学生物医学工程教授Joseph Izatt表示,“看到我们几十年来研究的生物细胞成像技术可以直接转化为大规模、实时的3D视觉,非常令人兴奋。这正是机器人安全观察人类,并与人类互动所需的能力,甚至在增强现实中,可使用实时3D视频取代虚拟化身。”
之前采用激光雷达的大部分设备都依赖旋转镜扫描环境中的激光。虽然此种方法很有效,但从根本上受到机械反射镜速度的限制,无论其使用的激光有多强。杜克大学研究人员使用一种衍射光栅,其工作原理类似于棱镜,可将激光分解成彩虹般的频率,离开光源时就会散开。由于原始的激光仍在快速地扫某一频率范围,这意味着扫激光雷达光束的速度要比机械反射镜的旋转速度快得多。这使得系统可在不损失深度和定位精度的情况下,快速覆盖广泛的区域。
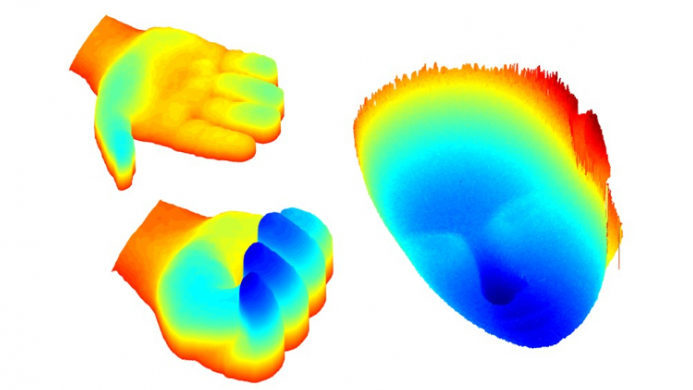
虽然OCT设备用于描绘物体内部几毫米深处的微观结构,但机器人3D视觉系统只需要定位人体大小物体的表面。为了实现这一目标,研究人员缩小了OCT使用的频率范围,只寻找从物体表面产生的峰值信号。这导致系统的分辨率有所降低,但成像范围和速度却比传统的激光雷达要大得多。这一方法使FMCW激光雷达系统实现了亚毫米定位精度,且数据吞吐量比之前的演示提高了25倍。研究结果表明,该方法足够快速和准确,可以实时捕捉到人体运动部位的细节,如点头或握拳。
Izatt表示,“我们的愿景是开发新一代基于激光雷达的3D摄像头,此种摄像头速度快、功能强大,能够将3D视觉集成到各种产品中。我们周围的世界是3D的,如果我们想让机器人和其他自动化系统与我们自然而安全地互动,就需要使其能够看到我们,就如我们可以看到它们一样。”

来源:盖世汽车
作者:罗珊
本文地址:https://www.d1ev.com/news/jishu/171587
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号