盖世汽车讯 据外媒报道,英伟达(Nvidia)创始人兼首席执行官黄仁勋(Jensen Huang)在英伟达GTC主题演讲上表示,到2024年,公司将为自动驾驶汽车行业提供覆盖北美、欧洲和亚洲300,000多英里道路的地面实况测绘平台。该平台名为Drive Map,旨在实现高水平的自动驾驶。Drive Map不仅对现有英伟达客户开放,而且还会增强公司现有的AV解决方案。
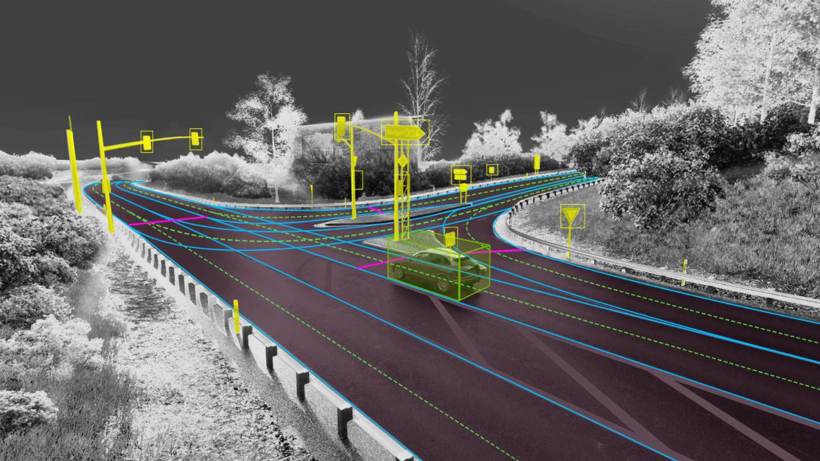
图片来源:英伟达
在这次主题演讲中,英伟达还宣布推出下一代传感器和计算自动驾驶工具包Drive Hyperion,梅赛德斯(Mercedes)、沃尔沃(Volvo)、集度(JiDu)以及比亚迪(BYD)和Lucid Motors等公司都在使用该工具包,以提供各种智能驾驶和高级驾驶辅助功能。
不仅如此,图森未来(TuSimple)、文远知行(WeRide)、Zoox和元戎启行(DeepRoute.ai)等自动驾驶公司也都在使用Hyperion。
Drive Map是英伟达去年收购高清地图初创公司DeepMap的成果。该工具通过将DeepMap的精确测量地图与匿名地图数据相结合,可提供厘米级精度,而这些数据由使用英伟达Hyperion架构的所有车辆中众包而来。该地图工具具有三个定位层,分别是摄像头、激光雷达和雷达,从而可以提供自动驾驶所需的冗余。
随车辆行驶,从英伟达客户提取的所有数据都会不断上传至云端,然后将其聚合并加载到英伟达Omniverse。其中,Omniverse是英伟达为虚拟协作和实时物理精确模拟而构建的开放平台。随后该平台会利用这些数据更新地图,从而使得车辆能够实现正确定位。在此过程中,英伟达能够更快地扩展其映射足迹。
此外,Omniverse还会使用自动内容生成工具来构建详细地图,然后将其转换为可与Nvidia Drive Sim一起使用的可驾驶模拟环境,即自动驾驶汽车的端到端模拟平台。
来源:盖世汽车
作者:刘丽婷
本文地址:https://www.d1ev.com/news/jishu/170910
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号