作者 | 爱LiDAR的小飞哥
编辑 | 王博
“大!超大!更大!”
最近,补盲激光雷达市场热闹非凡,各家在宣传产品的视场角时竭尽全力,毫不吝啬形容词。
回归到实际需求,多大的视场角够用?超大是多大?多大算大?
今天就来盘一盘补盲激光雷达视场角(FOV, Field of View)这件事。
在谈视场角之前,先谈谈补盲激光雷达。
首先,补盲激光雷达到底是什么?
大多数人会从字面意义上理解,认为是对于自动驾驶车辆盲区进行覆盖的激光雷达传感器。其实,这里的“补盲”一词,并不能完全准确地描绘该类激光雷达在自动驾驶里面扮演的角色。其含义,更多的是指产品弥补了长距激光雷达覆盖不到的区域。
业内认为,补盲激光雷达主要负责的是近车身的感知空间的覆盖,为自动驾驶车辆提供更为精准的车身周围障碍物和空间感知能力。
那么,为什么需要补盲激光雷达?
中汽研去年编制的《自动驾驶汽车交通安全白皮书》中提到,人类驾驶汽车事故中追尾事故最多,占到整体的29.9%,而侧部、前部碰撞以及碰撞固定物(道路上的交通设施)也分别占整体的29%、12.9%以及12.7%;
梳理人类驾驶汽车时发生的道路交通事故特征,会发现,因车辆设计缺陷等因素形成的驾驶人视野盲区,导致车辆在转弯过程中容易发生事故。此外,无信号灯交叉口和红绿灯等处也是人类驾驶过程中的事故多发地。
此时,补盲激光雷达的侧向覆盖就显得尤为重要。
我们还可以从一些场景中感受一下。
场景一:高速公路上,遇到超宽车辆时的邻车道间距保持
在高速公路上,由于超宽车辆本身装载的货物经常超长超宽超高,很容易遮挡周围车辆驾驶员视野。此外,超宽货车也容易挤占其他车道,在与他车会车时经常发生剐蹭事故。
针对此类场景,就需要侧向激光雷达的感知能力,精准把控邻车辆间距,避免不必要的事故发生。
场景二:拥堵十字路口的拐弯,有大量VRU(弱势道路使用者,一般指行人、两轮车)的情况下
在城市道路中,转弯的时候经常会遇到人车合流的情况,需要增强车辆侧后方的感知能力,以对车身周围的物体,特别是VRU形成精准的距离感知,从而保证整个自动驾驶过程的安全与平稳。

从上述场景可以看出,补盲激光雷达是独立于长距前向激光雷达的一个重要的品类,在很多自动驾驶场景中,如高速行车、中低速城市工况、全场景自动泊车等都扮演着重要的角色。
因此,补盲激光雷达性能指标的定义,不仅需要充分考虑与长距激光雷达相互配合的默契,更要针对补盲激光雷达的使用场景和希望解决的感知问题做出分析。
第一个指标,便是空间覆盖范围,专业的叫法是视场角(FOV)。
要定义一款补盲激光雷达的FOV,必须要考虑到以下两点特殊性:
1、补盲激光雷达,特别是采用固态技术路线的补盲激光雷达,从产品维度上而言是很难做到180° X 180°覆盖的。
难点不在于技术是否可行,而在于所做出的产品成本及外观无法与FOV设计达到平衡。
因此,如何从产品端尽可能扩大有效的覆盖范围,将有限的FOV用到最关键的区域至关重要。
2、补盲雷达的固有特点,注定了其安装位置存在多样性,无论是安装位置还是安装角度,都存在多种可能。
补盲激光雷达与自动驾驶车辆,特别是乘用车的造型面有着更强的耦合,因此在安装位姿上会存在诸多的限制。毕竟,对于乘用车而言,造型总是优先的。
因此,如何在造型面限制的前提下,尽可能扩大有效的FOV覆盖,这才是产品定义的重点。
对于乘用车而言,为了增强侧面的覆盖,会将补盲雷达放置在车身的侧面。
其中,一个比较推荐的安装位置是在车辆前轮翼子板附近,这样既能有效覆盖后视镜盲区视野,又能兼顾车身侧低矮视野盲区。
这个位置是车身造型设计中相对敏感的区域,需要在覆盖范围和造型美观之间取一个平衡点。
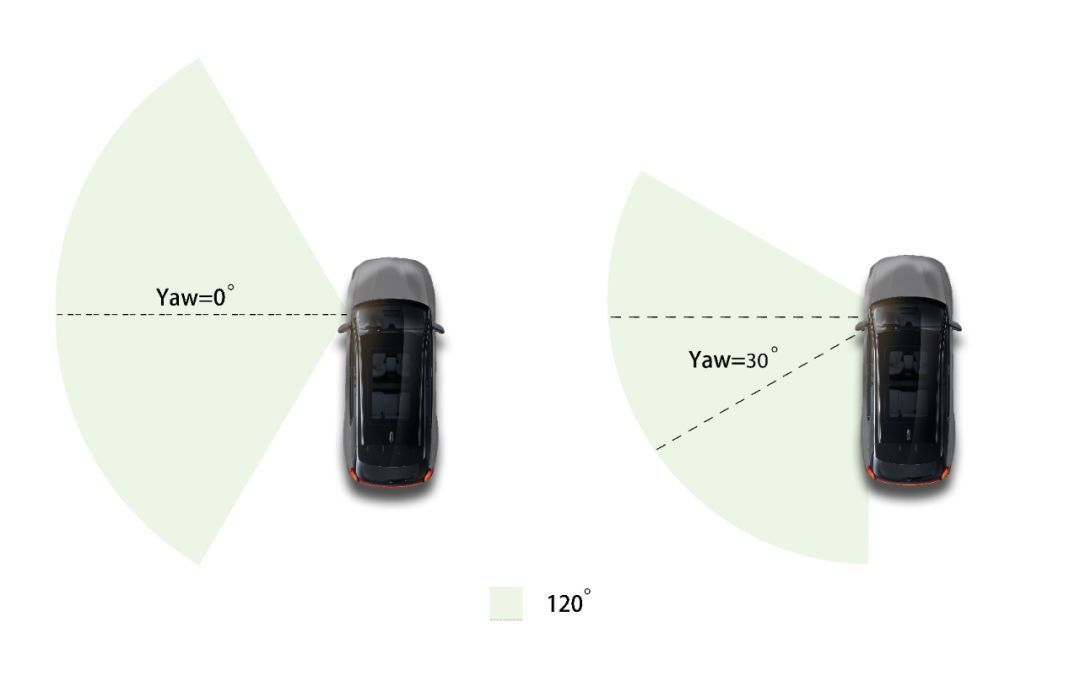
以一个水平视场角为120°的补盲激光雷达为例,为了实现激光雷达对于车侧后方的全覆盖,翼子板上的雷达中心需向车后方偏转30°(yaw=30°),这样无疑会使雷达窗口明显凸起,严重影响车辆美观。
因此,出于对造型设计的考量,安装在前翼子板处的激光雷达中心轴与车身前进方向中心轴垂直之间的夹角不宜太大,一般都是垂直放置(即yaw=0°),这样能最大限度使雷达视窗平面与车身装饰面平行贴合,最小程度减少雷达对车身造型的影响。
在这个前提下,就要求补盲激光雷达的水平视角尽可能大,以弥补在空间覆盖上的不足。

当前,市场上已有的固态补盲激光雷达水平视场角在100°-120°之间。
不过,笔者听闻,市面上还有新的补盲激光雷达产品在酝酿中。据说水平FOV可以达到140°。
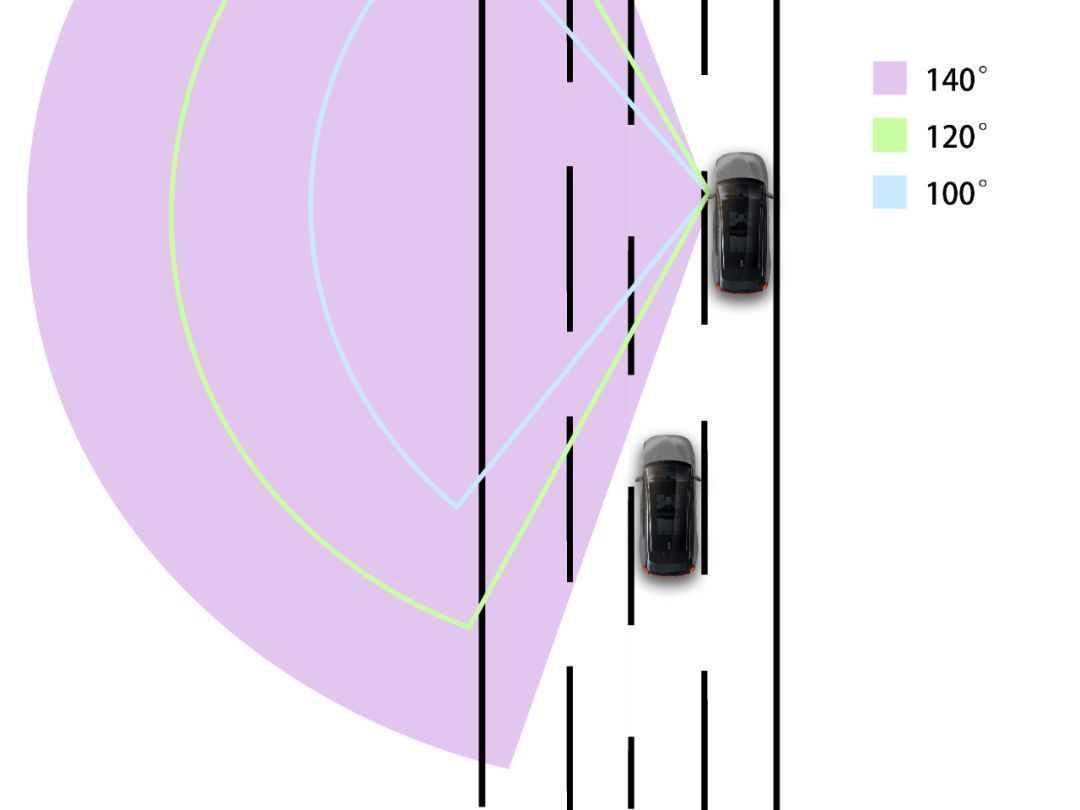
这款产品不仅在造型上更加符合流线车身设计,而且在不进行航向角调整的情况下,能够更好的覆盖车侧后向的区域,从而能够更快、更早感知到对应边缘区域的目标物,在感知范围和时间上具有明显的优势。
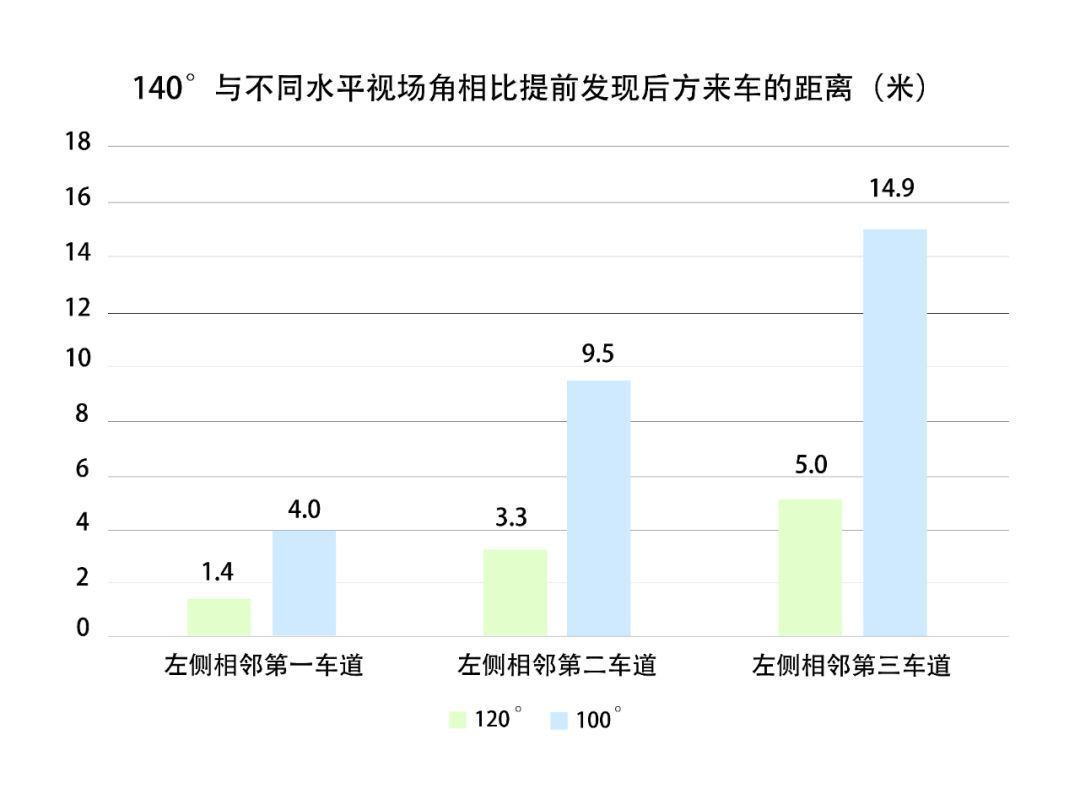
如下图所示,对于相邻车道,140°视场角覆盖能够比120°提前1.4米发现后方来车,在相距三车道上,其提前量甚至达到了5米,这段距离使得相邻车道可提前300-700毫秒发现目标车辆,为后续的规控系统留出充足响应时间。
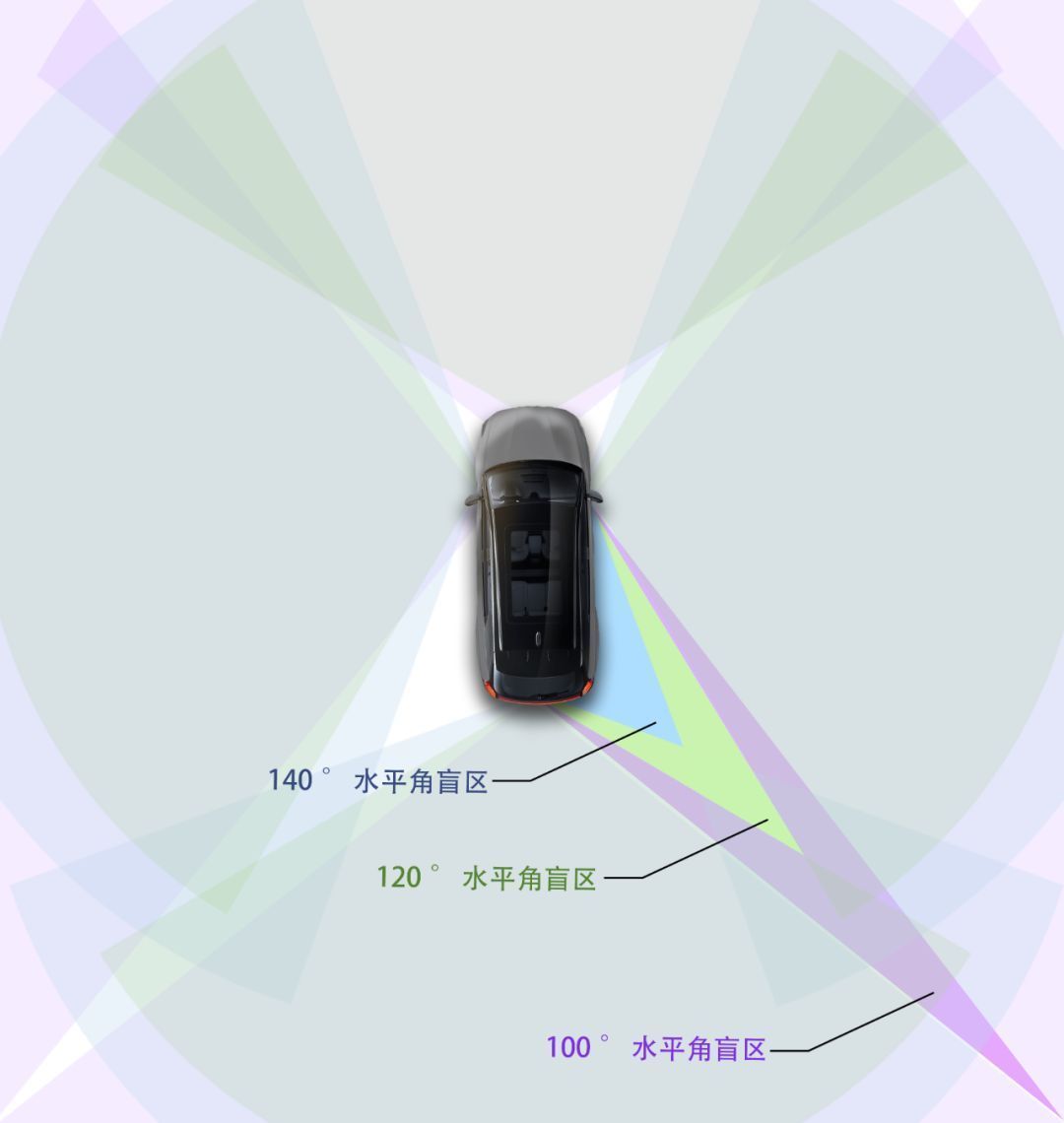
此外,对于很多高等级的自动驾驶应用,会存在多传感器覆盖的场景,希望能以更少的传感器实现更小的覆盖盲区。
从下图可以看出,在同样实现360°盲区覆盖的情况下,140°视场角拼接方案下的盲区可以做到比120°拼接方案小整整一倍。
再来看垂直视场。
垂直视场角分为水平面以上与水平面以下。
水平面以上的区域,需要一定的角度范围来完成车辆行驶中出现物体的整体感知与避障,但更大的上方区域已在驾驶员或车顶激光雷达的覆盖范围内,因此补盲雷达在垂直方向,需要一个平衡点来合理分配水平面以上和以下的视场,从而避免不必要的性能浪费。
相较水平面以上,水平面以下的覆盖范围是补盲激光雷达更关键的性能体现。一方面,该区域在驾驶员以及其他感知设备的覆盖范围之外;另一方面,很多场景中,地面附近的覆盖对于行驶影响更大,因此补盲雷达水平面以下的视场角越大越好。
但就当前来看,已上市的补盲激光雷达大多采用平均分布方案,即垂直视场角在水平面以上和以下相同,这样不仅仅浪费了向上大角度的覆盖空间,更无法实现关键的车辆周边地面近身区域的有效覆盖。
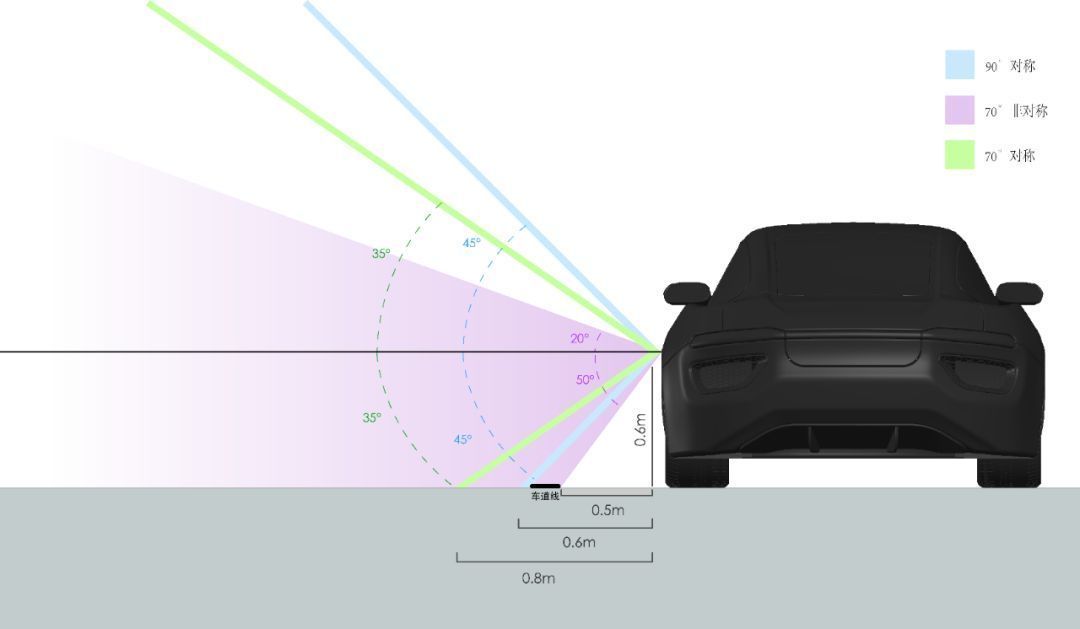
针对此场景,上面提到的那款新产品,提出了非对称垂直FOV的概念,将70°的FOV分为水平面上20°和水平面下50°。
水平面以上,20°视场角足够检测车辆和物体全貌。具体来说,距离一个车道外就可以看到相邻车道的车辆与行人,能充分满足水平面以上的感知需求。
水平面以下,50°(水平放置)视场角为当前业内最大,使车道内自车车身周边的路面盲区显著缩小,能够探测路沿、低矮安全护栏、砖块、地锁、石墩、锥桶等路面常见障碍物,大幅度减少地面盲区,提高近场感知物体能力,同时也能够帮助完成车道线识别。
这种非对称的垂直视场分布方案的实际覆盖效果,甚至超越了90°对称垂直FOV的实际覆盖效果。
那么,那些对称垂直FOV的补盲激光雷达产品,能否扩大水平面以下垂直视场角?
可以。
不过,为了尽可能的扩大向下的FOV,这些对称垂直FOV的产品需要将激光雷达本体更多地向下倾斜,从而导致激光雷达的“额头”更靠外,对于整车造型设计并不友好。
而采用非对称设计,就可以在常规的造型面设计上实现更多的向下覆盖,可以满足绝大多数车型造型面的匹配。即便是在极端条件下需要更多的垂直覆盖,仅需根据需求向下微调即可达到理想的覆盖效果,降低外形设计的难度。
回到最初的问题,视场角多大算大?
其实,补盲激光雷达对于大视场的追求从未停止,但可以肯定的是,追求大并不是最终目的。基于智能驾驶对于补盲的真实需求、基于对自动驾驶车辆工程化的理解,给出合适的解决方案和产品演进路线,才是补盲激光雷达的真正使命。
最后,提前剧透一下,文中提到的补盲激光雷达新产品,与一径科技推出的ML-30s有很大的渊源。
据悉,一径将在2023CES展上重磅发布新一代补盲激光雷达产品,虽然还不知道新产品的具体名字,但可以确定的是,这款新产品的视场角将会是:
140°x70°。
绝对吸睛。
来源:第一电动网
作者:HiEV
本文地址:https://www.d1ev.com/kol/190714
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!







 京公网安备
11010502033163号
京公网安备
11010502033163号