蔚来 ET7 已经交付一段时间了,这也是很多用户第一次使用搭载激光雷达的智能电动车。

很多人会问,激光雷达究竟有什么用?蔚来搭载的激光雷达又有什么独特之处,对不对得起 ET7 旗舰车的身份?
近日,蔚来的智能硬件副总裁白剑面对媒体,讲述了这款硬件背后的故事。
在长达一个小时的 workshop 中,白剑还直面了三个焦点问题:蔚来是怎么看待纯视觉和传感器融合两条技术路线的?激光雷达是不是越多越好?怎么评价友商宣传的 128 个激光器?
一、量产最强激光雷达
ET7 搭载的这枚 1550nm 激光雷达属于图达通的猎鹰系列,这里的 1550mm 指的是雷达激光器的波长。
这是一款混合固态激光雷达,参数上它拥有 120° 水平视角、25° 的垂直视角和 0.06°×0.06° 的最大分辨率。

重点是,它既是世界上首款量产的 1550nm 激光雷达,也是量产中探测距离最远的激光雷达。不仅如此,蔚来给这枚激光雷达提出的三个核心指标是:看得远、看得清、看得准。
1、看得远
“远”是这枚激光雷达的一项重要特征。
有多远?
白剑是这样描述的,“由于他能够支持大功率的发射,所以最远的探测距离甚至可以到 500 米。”
可他又说到:“激光雷达只讲探测距离,不讲反射率这个限定条件就是耍流氓!”
什么是反射率?
从技术上讲,激光雷达的工作原理是在发射端持续、等间隔地发射激光束,这些光束遇到障碍物会反射回来,反射回来的多少又叫“反射率”。
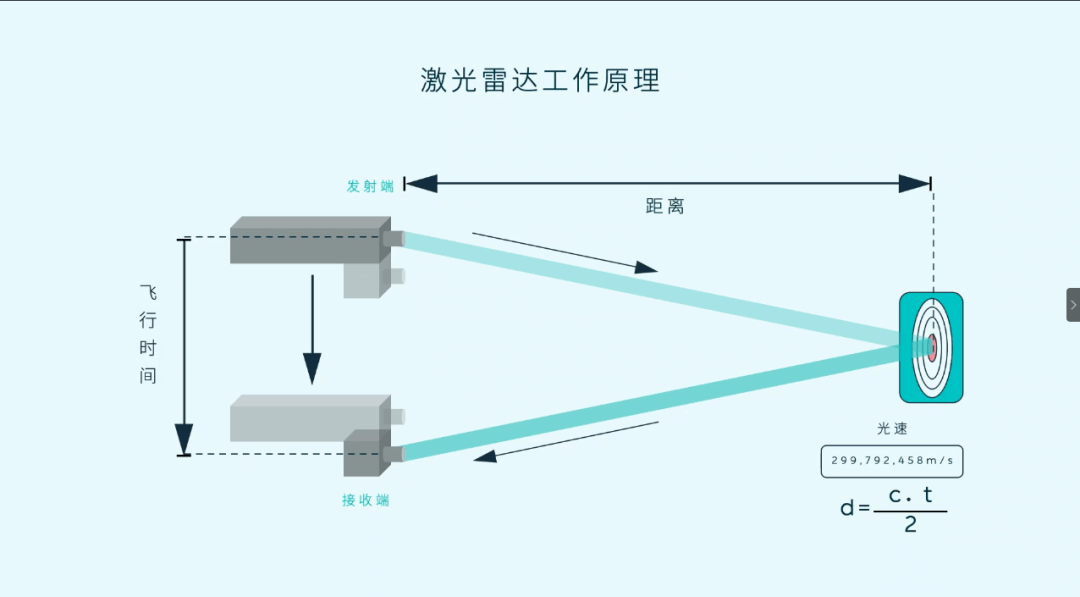
简单来说,反射率越高就意味着看得越清楚。
但反射率并不是一个稳定的指标,反射物表面的质地会造成很大的影响。比如金属路牌,它的反射率就很高;而偏黑偏暗的衣服、车漆油漆就要差得多,通常只有 10%。
蔚来能够做到的是,在 250 米距离上实现这个 10% 的反射率。换句话说,这颗激光雷达最远可以在 250 米处“看清”这些低反射率的物体。
这还只是一个极端的情况,要知道低至 10% 反射率的物体在自然界并不常见,也就是说激光雷达实际上能看得更远。
白剑对比了一些市面的量产激光雷达,它们在检测 10% 反射率物体的有效距离一般都是 200 米,甚至是 150 米。
“从看得远这个角度来说我们是当之无愧的。”白剑很有底气。
2、看得清
仅看得远是不够的,关键还得“看得清”。
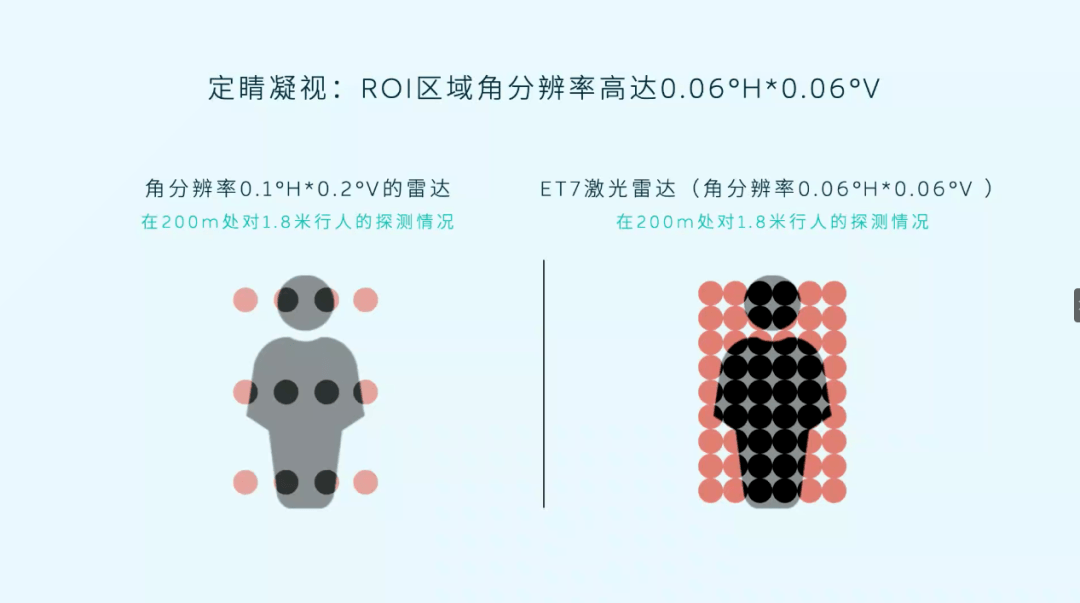
这就不得不提分辨率这个概念,蔚来给出的参数是 ROI 区域在“定睛凝视”下的分辨率是 0.06°H × 0.06°V。
和摄像头数据类似,评价激光雷达清晰度的一个重要指标也是分辨率。虽然激光雷给到的是 3D 图像,但它和二维图片一样,都是一个个“点”去表述物体特征的。
理论上,相同大小的物体,点数越多,描绘得就越清晰,这就是激光雷达的分辨率。
那么怎么理解蔚来的 0.06°H × 0.06°V 这个参数呢?
我们分解下这组数字,H 代表水平方向、V 代表垂直方向,0.06° 代表每 0.06° 就有一个“点”。串起来就好理解了,这其实是一个简单的数学题。
120° 水平视角和 25° 垂直视角组成的整体视野下,蔚来激光雷达能够反馈出水平方向 120÷0.06=2000 个点;垂直方向 25÷0.06≈416.67 个点。
白剑举了一个图示,同样是一个 1.8m 的行人,他在 200 米处的探测点数是这样的:
对于能力的展现,白剑很谨慎,他强调:“这些指标或者一些特征,都必须要有很多的定语或者说测试条件,否则的话他的数据对比就不是那么的精确和准确了。”
不过需要注意的是,蔚来这里提到的最大分辨率 0.06°H × 0.06°V 是基于“定睛凝视”模式下的。你可以理解为这是一种通过算法实现“人眼聚焦”的功能。
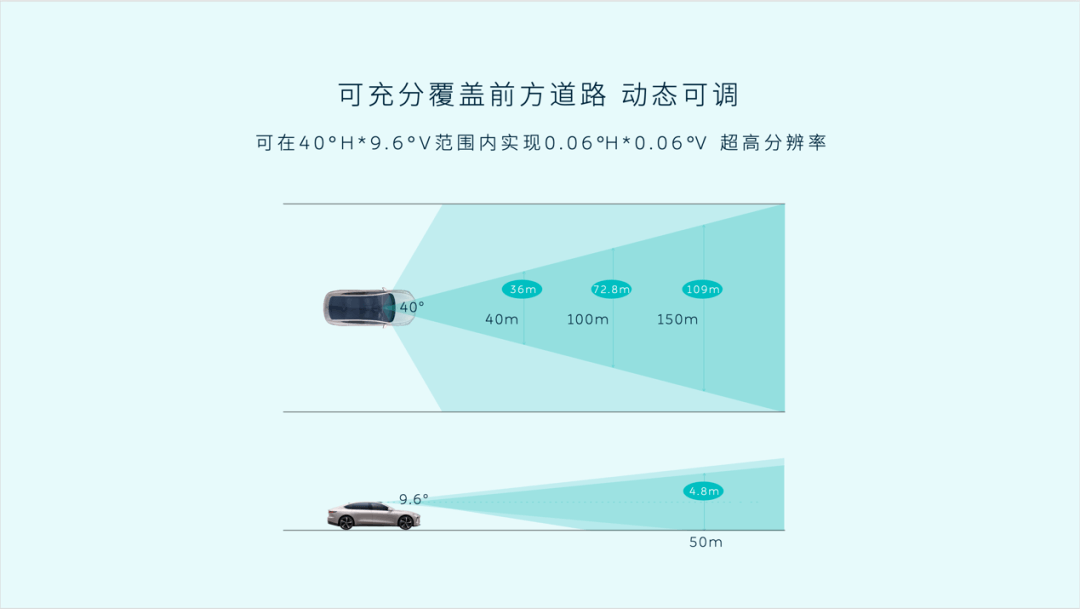
“从背后的原理上讲就是把人眼的感光的像素都聚焦到这么小的一个范围内给他。”白剑解释说。他还补充说,“在 40° 的水平、9.6° 的垂直范围内,我们都可以实现这么高的分辨率。”
白剑还补充说,ROI 区域外的分辨率不是一个固定值,它会有一个渐变的过程,实际表现中相当于一款 144 线激光雷达的能力。
据我们了解,其实类似“定睛凝视”的功能在速腾聚创的 M1 激光雷达上也有体现,这枚激光雷达也是被应用在小鹏 G9 等车型上,具体我们就先不展开了。
3、看得准
第三个指标是看得准。
这里白剑提到了一个 POD 的概念,中文又叫做探测概率。之所以引出这个指标,是因为工程设计和实践应用中往往会存在差距。
好比再高清的屏幕都会有“坏点”,参数再高的激光雷达也很难保证所有的反射点都能被准确的接受,这些都存在概率。
POD 这个指标就代表了激光雷达最终能成功接受多少点数,越高就意味着点云越丰富,看得也就越准。
蔚来的成绩是 90%。也就是说,10 万个点发射出去,蔚来的激光雷达能够成功接收 9 万个回来。
"很多的激光雷达是远低于这个水平的。"白剑如是说。
二、蔚来:坚定的传感器融合拥护者
在马斯克看来,用激光雷达的车企都是“傻子”。但蔚来等企业用实际行动证明,传感器融合才是最优解。
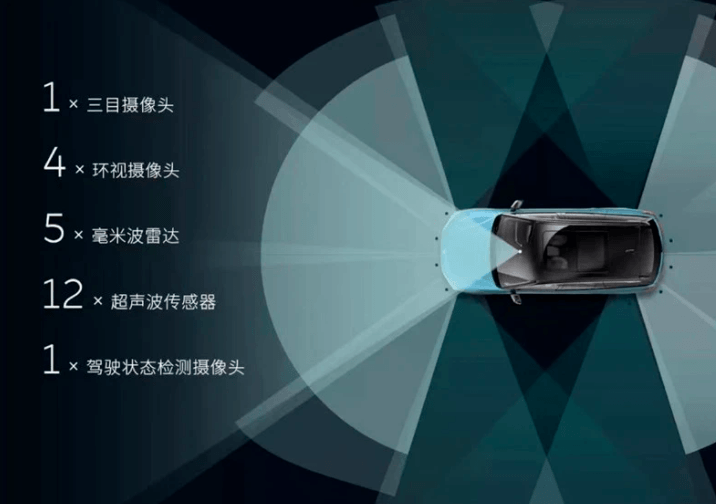
以 ET7 为例,它搭载的 Aquila 超感系统配备 33 个感知硬件,除了 1 个激光雷达外,它还搭载了 7 个 800 万像素摄像头、4 个 300万像素环视摄像头、1个增强主驾感知、5 个毫米波雷达、12 个超声波传感器、2 个高精度定位单元和 V2X 车路协同。
这是一套典型的传感器融合的高配置方案。
蔚来之所以在大量高规格摄像头的基础上还要再加一颗激光雷达,白剑是这样考量的:
“人眼、摄像头还有激光雷达看到的世界是各不相同的。”
白剑认为,人眼和摄像头最大的区别在于,人眼背后的大脑能够瞬间获取深度信息,而且人眼具备比摄像头强大许多的变焦功能。无论是近距离还是远距离,人眼都要比现阶段的摄像头强大得多。
目前的摄像头和人眼相比就像是小学生和大学生同场竞技,所以还需要多传感器融合帮忙。
白剑举了两个常见的场景:
1、逆光出隧道巨大的明暗变化
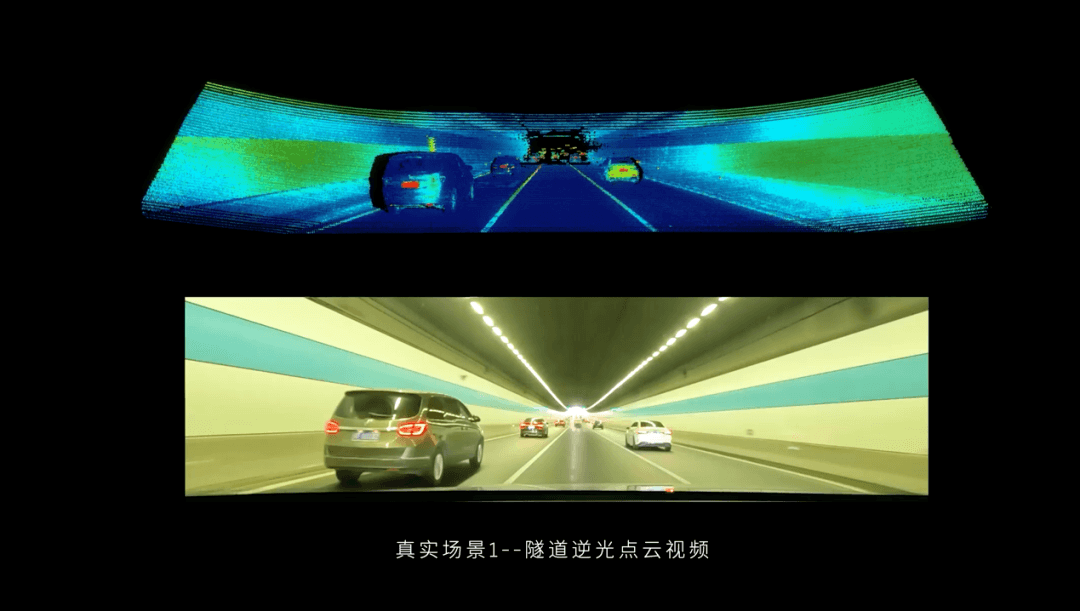
在大光比的环境下,摄像头甚至是人眼都已经看不清了,但是激光雷达不存在这个问题;
2、远处路面塑料袋横飞
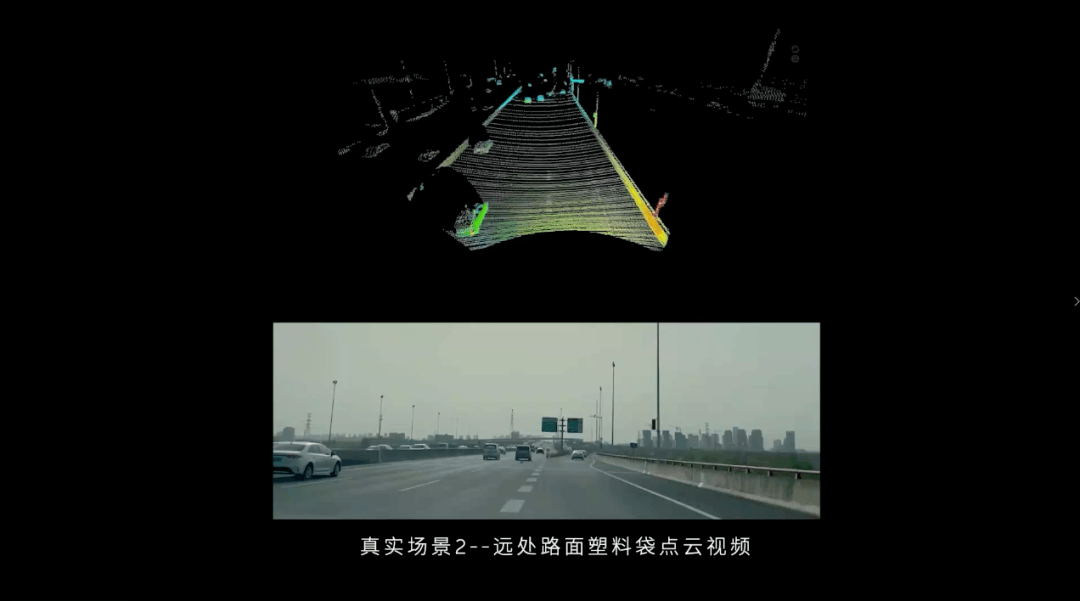
在人眼看来,它很容易判断路面上的异物是一个塑料袋并排除威胁,但摄像头很难判断它的具体性质,必须先搞清楚,再做出反应,而激光雷达通过 3D 信息能够很多地知道这是一个又轻又薄的物体。
简单的两个例子,白剑强调了激光雷达的在某些场景下的重要性。
另外,在面对“污染”的情况下,激光雷达比摄像头也表现出了更好的适应性。在同等脏污下,摄像头画面已经像是蒙了一层纱,而激光雷达的点云是基本不受影响的。

白剑还说,一旦激光雷达表面的脏污影响到了性能,系统算法会在仪表作出提示,提醒用户通过随车配发的清洗套装进行清洗。
三、联合开发背后的逻辑
和汽车界过去常见的“拿来主义”不同,蔚来在激光雷达应用上采用了“联合开发”的模式,他们选择和图达通一起去开发硬件,而蔚来也同样是图达通的投资方之一。
在过去,这一类的传感器都是供应商开发,然后交给主机厂进行布置、测试、验收。
白剑说,这种模式下有两点大的弊端:
1、开发流程长,供应商开发需要几年,主机厂上车又需要几年;
2、一旦开发完毕,主机厂很难再做深度定制或者修改,也就很难把性能发挥到极致。
所以蔚来选择和图达通联手研发的初衷就在于此。
这种新模式给蔚来带来的好处也是显而易见的:
1、开发周期缩短,蔚来能够更好地适应快速迭代的智能电动车行业;
2、优势整合,无论是可靠性还是供应链以及成本上都带来优势;
3、更好的量身定制,为 ET7 风阻系数、设计美观度等各种指标实现最优。
以这枚激光雷达的电路板为例,这方面就是蔚来主导的,它帮助激光雷达完美融合车身,大大提高了整体美观度,同时实现了 0.208 的风阻系数。
保证美观度的同时,激光雷达还随着整车经历了一系列的车规考验,比如能够经受最大 50G 的冲击、极寒极热、严酷的光照......
总之,从设计开发到量产,从无到有的整个工业化进程,蔚来都深度参与其中。作为精密仪器的激光雷达,它的设计生产过程既是图达通的技术表现,也是蔚来的一种自我突破。
四、多激光雷达和 128 个激光器的争论
先说多激光雷达。
自激光雷达逐步上车以来,车企间的军备竞赛就开始了。
蔚来 1 颗、小鹏 2 颗、威马 3 颗、哪吒 3 颗、极狐 3 颗、阿维塔 3 颗、更有沙龙汽车的“4 颗以下别说话”......
激光雷达是不是越多越好?
白剑是这样的说的,“当正向、高速、处理的场景非常复杂的时候就需要激光雷达(或者说是特别需要激光雷达),所以我们选用了这一颗前向的激光雷达。
有一些侧向激光雷达,它的应用场景多半是在无保护左转,Cut-in(加塞)这些场景,这些场景下车速一般比较低,这种情况下,(蔚来)Aquila 的视觉系统就可以提供比较足够的深度信息。”
白剑还格外强调,“Aquila 的两颗 Side Front 8M 摄像头正好是放的比较高(的位置),瞭望塔式的结构视野非常好,这种情况下可以帮助我们处理测试补盲的场景。”
我简单总结一下白剑的观点,他的意思是,蔚来的单颗前向激光雷达就可以应对复杂的场景,而一些要求不高的低速情况下,瞭望式的 800 万摄像头就可以充分地兼顾到盲区。
激光雷达的数量取决于蔚来 Aquila 整体的传感器规划,这是一个系统工程。换句话说,摄像头能够做好的事情,为啥还要去堆更多的激光雷达?
同样“多就是好?”的疑问是激光器方面的。
在理想 L9 的发布前后,其搭载的 AT128 激光雷达一直以有“128 个激光器”作为重大宣传点。
不少媒体在对比各家方案的时候都会说这么一句:“理想 L9 有 128 个激光器、蔚来 ET7 只有 1 个、小鹏 G9 只有 5 个。”
这个“只”字很耐人寻味,极易让人产生“三六九等”的判断。

在论述中,他们也格外指出激光器数量越多,意味着激光雷达的分辨率越高、冗余度更好。
那么 128 个激光器究竟是什么意思?究竟是不是越多越好?
首先白剑解释分辨率的问题:
“激光雷达是否能看得清与分辨率有关,跟激光器的点数也有一定的关系,但没有非常必然的关系。激光器的点数少,让电机转的快一点,扫描的快速一些,一样可以做到高分辨率,没有太多的耦合性。”
再者白剑否定了数量“越多越好”这个说法:
“大概率这个 128 线的激光器是 VCSEL,128 点就是 128 条线,坏了一个点就少了一条线,变成 127 线。
这个还不是少一条线的因素,如果一个感知,激光每一帧的图像都少一条线,如果那条线上正好是扫描一个非常关键的要素点,这对感知来说是非常可怕的事情,也不是说这个点数越多越好,我们应该说分辨率不止越高越好,还得可靠性越高越好。”
最后
聊完争论,我们说回到蔚来的激光雷达。
关于激光雷达的应用,白剑说,它的性能体现不仅会在今年三季度交付的 NOP+ 上,实际上,激光雷达已经作用于 ACC 和 LCC 的功能上。

ET7 用户现阶段使用 AEB 的时候,激光雷达就在工作了。
换句话说,蔚来的激光雷达并不是期货,从基本的驾驶辅助到进一步的高阶自动驾驶,它的能力正在逐步显现,软件一直都是 stand by 的状态。
(完)
来源:第一电动网
作者:电动星球News蟹老板
本文地址:https://www.d1ev.com/kol/178359
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。


相关圈子


先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!









 京公网安备
11010502033163号
京公网安备
11010502033163号