
2010 年特斯拉 IPO 募资 2.26 亿美元。
2018 年蔚来 IPO 募资 10 亿美元。
2020 年理想 IPO 募资 11 亿美元、小鹏 IPO 募资 15 亿美元。
2021 年,美国电动车初创企业 Lucid MotorsIPO 募资44 亿美元,成为迄今全球智能电动车领域 IPO 募资规模最高的企业。
2 月 24 日,Lucid 与 Churchill Capital IV(CCIV)达成协议,Lucid 将通过与后者合并的方式完成在纽交所上市。
根据双方发布的联合声明:
此次参与私募股权公司包括 Lucid 现有大股东沙特公共投资基金(PIF)以及贝莱德、富达、富兰克林邓普顿等机构,其配售价格为每股 15 美元,合并后的新公司市值预计达到 240 亿美元。
扣除相关费用后,这笔交易将为 Lucid 带来约 44 亿美元的净现金。
值得注意的是,这也是全球电动汽车最大规模的 IPO。
虽然 Lucid 至今仍未向消费者交付一辆量产车,但这家公司的产品策略与特斯拉最为接近,而且在团队上也有着颇深的渊源。
Lucid 的「灵魂人物」CEO&CTO Peter Rawlinson 就曾是特斯拉 Model S 的首席工程师。另外,Lucid 的 19 人高管团队中,有 8 位曾在特斯拉任职。
也难怪外媒会把 Lucid 视作特斯拉最强的竞争对手。
那么,Lucid 如何与特斯拉展开竞争,最关键的当然是拿产品说话。
而智能电动车的竞争,无非就是核心的三电系统以及智能化/自动驾驶能力层面的比拼。
1
Lucid VS. 特斯拉:三电系统的素质
2016 年,Lucid 发布了新车 Lucid Air。
2019 年 11 月,Lucid 在美国亚利桑那州价值 7 亿美元(约合 49 亿元人民币)的建厂计划最终获得了当地政府批准。
这也意味着 Lucid 首款电动车型 Lucid Air 终于可以进入到大规模量产阶段。
在发布 3 年之后,也就是 2020 年 9 月,Lucid 正式公布 Lucid Air 起售价为 7.74 万美元,并定位为全球首款行驶里程达到 500 英里(约合 804 公里)的电动轿车。
若减去美国用户可享受 7500 美元的联邦税收减免,该款车实际售价为 6.99 万美元。
从产品定位以及售价两方面来看,Lucid Air 最直接的竞争对手就是特斯拉 Model S。
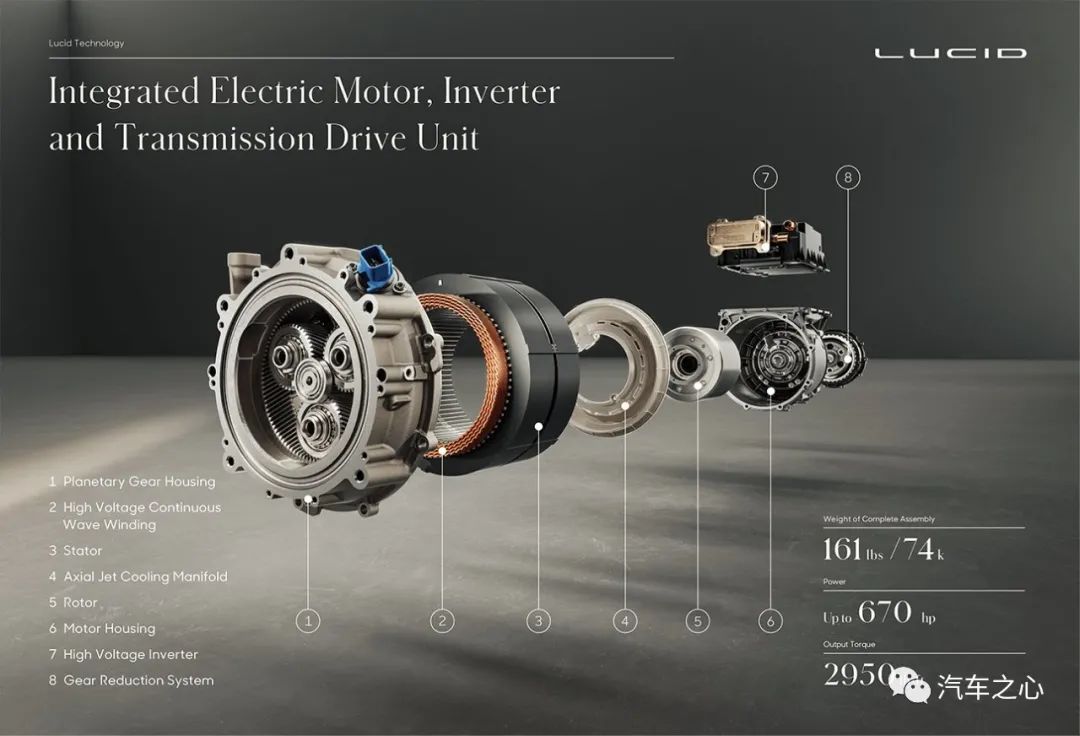
Lucid Air 拥有突破性的电机指标。
在 74kg 的重量下,Lucid 的驱动单元(电动机及其相关部件)能够提供高达 670 马力的功率,可以达到竞品接近 3 倍的程度。
根据卡内基梅隆大学电动车研究者的实测数据:
Lucid Air 的测试能耗大约是 136Wh/km,而同等情况下,Model S 为 156Wh/km。
Lucid Air 在能效上比 Model S 高了17%,其中 2% 来自空气动力学优化,15% 来自电机设计优化。
不过考虑到 Lucid 是直流永磁电机,效率比特斯拉的交流感应自然要高一些。
但至少两者是差不多同一层级的,交流感应的动态范围更大,但效率略低。
2021 年 1 月 28 日,国内特斯拉官网上推出了新款的 Model S 车型,总计三款车型:
售价从 79.999 万元到 117.49 万元,分别是双电机四驱长续航版、三电机 Plaid 版和 Plaid Plus 版,其中 Plaid 版百公里加速只有 2.1 秒,而 Lucid 是 2.5 秒。
电机很小,难点在于散热,最传统的散热方法是「风冷」——大概的做法就是在电机表面采用冷却栅的方式增加散热面积,有些还会增加散热风扇以增加散热效果,这样做的好处是成本便宜。
再有就是液冷,主要是在电机外壳体上布置冷却水道,让水流动起来带走热量。
这种散热方式,相对来说比较奢侈。
因为还要增设额外的电动水泵和散热器等,这无形中增加了额外成本以及功耗,并且结构也更复杂,制造难度也提升了。
但对 Lucid 来说,以上两种方式都不是他们想要的。
他们开发了「轴向射流冷却歧管」,通过这种歧管可以让水流经过发热的电线,从而达到降温的效果。
这里不得不翻一翻 Lucid 的历史。
其前身是 Atieva ,Atieva 是一家成立于 2007 年的主做电动车三电系统研发的公司,总部位于美国加州纽瓦克,主要的客户是整车车企,直到 2014 年才转型做电动车,并改名为 Lucid。
简单来说,Lucid 早期是一家汽车零部件供应商。
因为 Lucid 是 Formula E 赛车电池技术的独家供应商。
Lucid 设计并制造了所有 Formula E 赛车使用的电池组,并为 Formula E 赛车提供电池管理系统。
Lucid 对自家电池技术颇为骄傲。
Lucid Air 搭载的 924V 电池系统,是所有量产电动车中最高电压的电池组。再搭配上 113KWh 的大电池组,使 Lucid Air Grand Touring 版本可实现 832 公里的 EPA 续航。
Lucid Air 采用来自 LG 化学的21700 圆柱形电池。
区别于特斯拉的在电芯之间插入导热管来实现电池包温度管理,Lucid 的温度控制是在电芯的上下两层加入导热管。
这样的好处就是可以让相同体积的电池包塞入更多的电池,这也是 Lucid 最大的电池容量可以做到 113 KWh 的原因。
而这么做的结果就是 Grand Touring 版本的 EPA 续航里程可以达到 832 公里,换算成国内的 NEDC 标准,续航可轻松超过 1000 公里。
Lucid 采用 900 V 高压电池,相比 400 V 电池可以在输出相同功率的情况下,需要的电流更少。
那这就意味着可以用更细的电缆、电线,可以进一步让三电系统的体积更小。
但 Lucid 更关注的点是,更少的电流经过电线意味着更低的电阻,这让损耗变得更低,而这又可以让 Lucid Air 有更好的动力以及续航表现。
如果用数据来体现的话,Lucid Air 每度电的续航里程为 7.4 公里,相比特斯拉的 Model S 大概 6.6 公里,Lucid 在效率上显然做得更加出色。
而且它支持超过 300KW 的充电功率,超过充电功率 270KW 的保时捷 Taycan,以及充电功率 250KW 的特斯拉 Model 3 和 Model Y。
Lucid 要与特斯拉正面竞争,除了在三电系统层面的比拼,自动驾驶也是对标的关键点。
2
Lucid Air 挑战特斯拉的秘密武器:
MEMS 激光雷达
特斯拉目前已经在测试其完全自动驾驶系统 FSD,很快就要向消费者推送正式版本。
Lucid 必然要在这个领域奋起直追,首款车型 Lucid Air 配备的 DreamDrive 直接搭载32 个传感器,相比之下特斯拉 Autopilot 2.0 只有 21 个。
其中,最值得关注的点在于:
Lucid Air 也将搭载激光雷达,按照这款车型今年下半年量产交付的规划,其有可能是全球首款搭载激光雷达量产车。
Lucid Air 的 32 个传感器包括:
1 个前向激光雷达
1 个前视三目摄像头
4 个短距离毫米波雷达
4 个前后左右摄像头
1 个独立后视摄像头
12 个超声波
4 个鱼眼 360 环视摄像头
12 个超声波
1 个DMS 摄像头
这个方案没有使用长距离毫米波雷达。
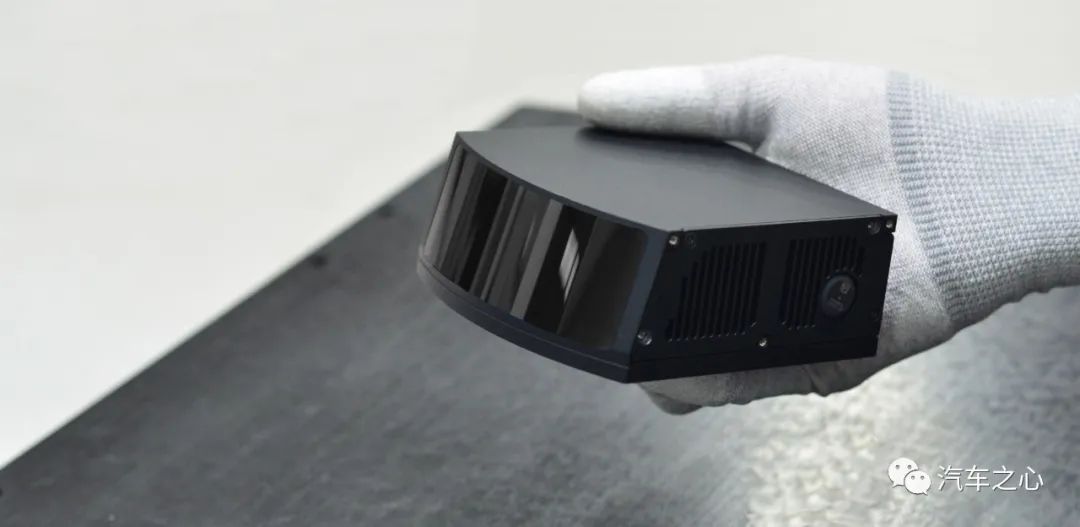
根据 Lucid 官方披露,其使用的激光雷达等效 125 线,并结合 Lucid Air 官方照片中开孔体积尺寸预估,该前向激光雷达是由国内速腾聚创提供(目前只有速腾聚创的产品 M1 符合等效 125 线,且体积小巧能嵌入 Lucid Air 车标下窄缝位置)。
Lucid 的激光雷达可以放在车标下方,也可以放在后视镜的位置,但考虑到挡风玻璃并非完全平面玻璃,可能影响性能,放在车标下方的可能性更大。
Lucid 为什么选中了速腾?
这里面其实有 Lucid 的长远考虑,硬刚特斯拉,自动驾驶系统需要满足全系车型装配需求。
因此 Lucid 选择激光雷达除了性能要高,体积尺寸要小,方案成本可下探的空间必须足够大。
因此,Lucid 从性能、体积、性价比和成熟度综合考虑选择了 MEMS 激光雷达技术路线。
但是众所周知,MEMS 在成本控制上优势最明显,但性能难提升。
MEMS 难点是信噪比和有效距离及 FOV 太窄。
首先,MEMS 激光雷达接收端的收光孔径非常小,远低于机械激光雷达,而信号光发射&接收峰值功率与接收器孔径面积成正比,这意味着信噪比降低。
然后,因为通常 MEMS 方案只用一组发射激光和接收装置,那么信号光功率必定远低于机械激光雷达,这导致功率进一步下降,就意味着信噪比的降低,同时也意味着有效距离的缩短。
扫描系统分辨率由镜面尺寸与最大偏转角度的乘积共同决定,镜面尺寸与偏转角度是矛盾的,镜面尺寸越大,偏转角度就越小。
最后,MEMS 振镜的成本和尺寸也是正比,目前公开资料中MEMS 振镜最大尺寸是Mirrorcle,可达 7.5 毫米,售价高达1199 美元。
速腾投资的希景科技开发的 MEMS 微振镜镜面直径为 5 毫米,已经进入量产阶段。
怎么解决激光收发模组成倍下降并同时保证性能的问题呢?
速腾聚创发明了多通道水平联合扫描技术。
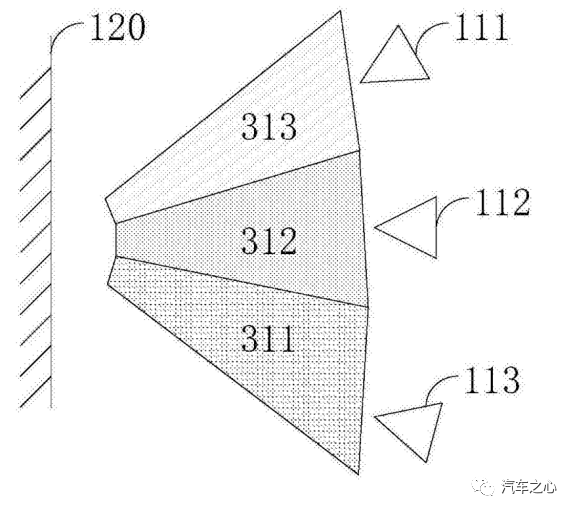
其思路很简单,将数个激光雷达合成 1 个,目前速腾聚创是 5 个。
因为有 5 个激光雷达水平联合扫描,那么每个激光雷达的 FOV 需求就很低,FOV 在 25 度即可。
这样 MEMS 振镜尺寸就可以大一点,性能就高一点。5 个激光雷达水平联合扫描,等于性能提升了 5 倍。
速腾聚创为此申请了专利。
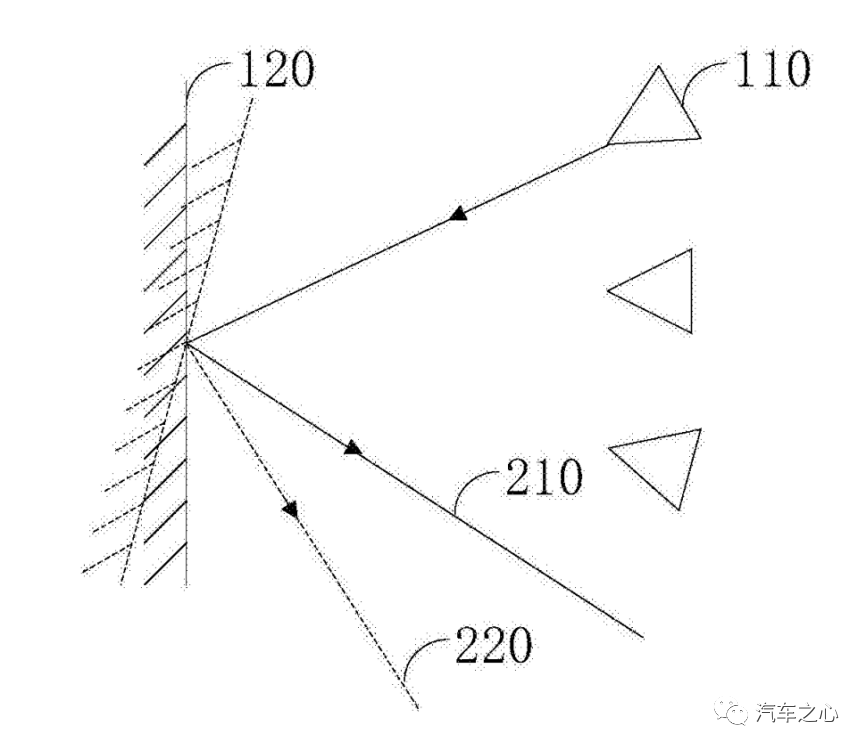
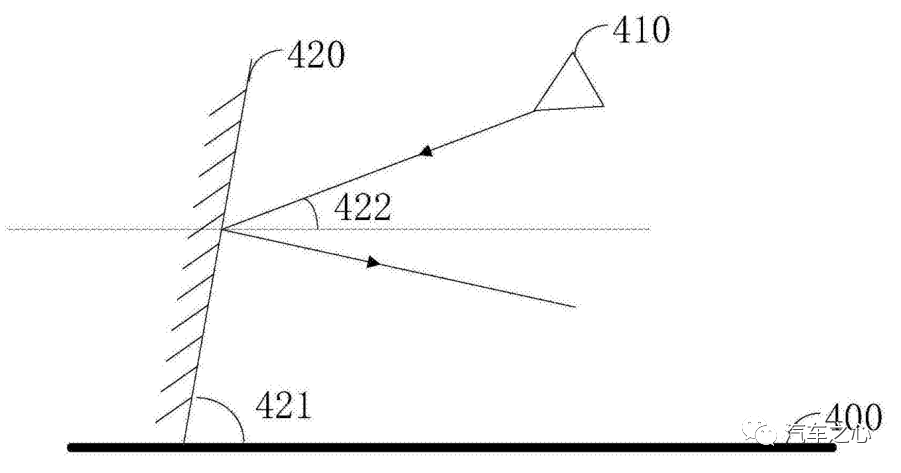
专利说明里只画了 3 个激光器,激光器(110)发射激光,到达振镜(120)表面被反射,反射激光即(210),在另一时刻振镜旋转,反射激光是(220)。
三个激光器联合为一个扇形。
为保证没有盲区,三个激光器覆盖区域边缘会有一点重叠。
振镜与水平面之间有个夹角(421),这个角度不能是 90 度,这样会影响反射激光的接受,会有干扰。
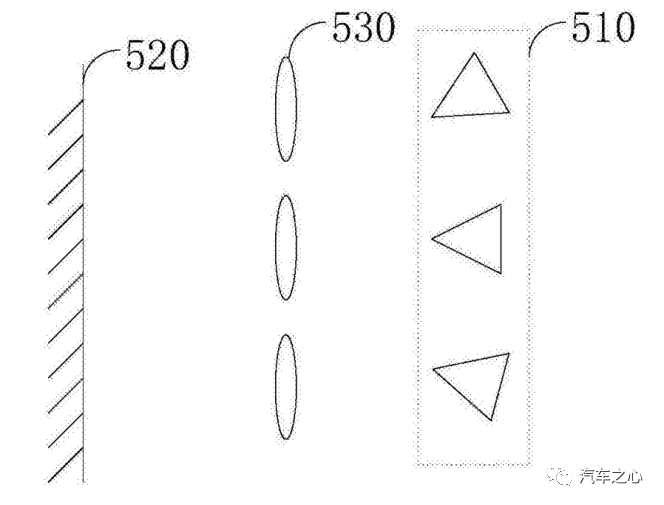
实际应用当中,还需要加准直透镜,如上图(510)为激光器,(530)为准直透镜,准直透镜是指能将来自孔径栏中每一点的光线变成一束平行的准直光柱的透镜,即Collimating lens,它是一种非球面镜,是多片透镜构成。
这种水平联合扫描激光雷达,不仅拓宽了雷达的 FOV,减少了对振镜的面积要求,提高了信噪比和分辨率,最重要的是可以比较灵活调整激光雷达的 ROI 区域性能。
激光雷达作为一种传感器,对传感器来说,信噪比是最核心的指标,不过也是激光雷达企业从不公开的指标。
非相干激光雷达的信噪比 SNR 方程可以表示为:
从上面公式可以看出,要提高信噪比,最简单有效的方法是提高信号光功率和量子效率。
激光二极管供应商也深知这一点,目前新型的激光二极管也有采用了多通道激光二极管的设计。
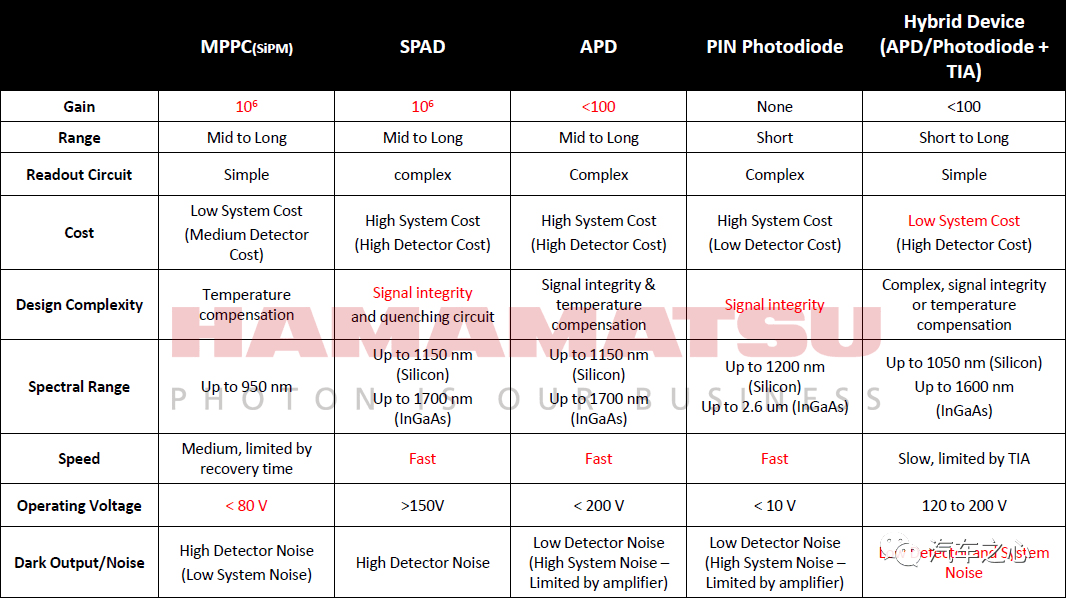
在发射方面,速腾聚创依然选用成熟的 EEL 激光器,但在接收方面选用了新型 SiPM,后者比 APD 的灵敏度提升了 10 的三次方量级,即量子效率提高 3 个数量级,用以提升系统信噪比。
同时其使用的单点 SIPM 巧妙地绕开了 SIPM Array 和 SPAD 的世界性难题:
串扰导致的强光雪花噪点甚至致盲的问题。
SiPM 又称 MPPC,即硅光电倍增管。
每个硅光电倍增管由大量的(几百到几千个)单光子雪崩二极管(SPAD)单元组成,每一个单元由一个 SPAD 和一个大阻值淬灭电阻串联而成,这些微元并联成一个面阵列。
为硅光电倍增管加上反向偏压(一般是几十伏)后,每个微元的 SPAD 耗尽层有很高的电场。
此时若外界有光子打进来,会和半导体中的电子空穴对发生康普顿散射,打出电子或空穴,高能的电子和空穴随即在电场中加速,打出大量的次级电子和空穴,即雪崩。
此时每个微元电路中电流突然变大,在淬灭电阻 R 上降落的电压也变大,SPAD 中的电场瞬间变小,即 SPAD 输出一个瞬时电流脉冲后雪崩停止,不同微元的淬灭电阻阻值相同,所以理论上讲每个微元会输出等大的脉冲。
工作在盖格模式下,增益可达 10 万倍,普通 APD 增益不到 100 倍,此外每个微元都是逻辑单元,有信号输出是「1」,没有信号就是「0」。
在硅光电倍增管的动态范围内,它输出电流的大小就和发生雪崩的微元数成正比,因此整体表现为一个模拟器件。
SiPM 与 SPAD 非常近似,SPAD面阵可以做到很高,松下、索尼和佳能的实验室已经能超过 100 万像素,只是 SPAD 成熟度不高。
目前阳光下窜扰比较难解决,晚上效果远比白天要好,索尼的背照设计能改善很多,但还需要时间商业化。
抛开技术成熟度,SPAD 的成本也比较高。
在背照式 SPAD 没有商业化状况下,目前最高性能的接收只能是 SiPM。
对激光雷达厂家来说,单独研发 SPAD 根本不可能,日本公司在这方面具备压倒性的优势,美国公司倒是擅长实验室开发,但很难商业化,而日本公司擅长商业化。
速腾聚创的水平 FOV 为 120 度,即 5 个扇形,每个扇形 25 度,中间有 1 度重叠。
最远探测距离 200 米,即使10% 的反射率下也有 150 米,传统 MEMS 激光雷达在 10% 的反射率下有效距离会低于 50 米甚至 30 米。
Lucid 用的速腾聚创 M1 激光雷达的厚度为 45 mm,深度为 108 mm,宽度为 110 mm,相当小巧。
对于 MEMS 方案的可靠性难题,速腾聚创也已经找到了解决方案。
2 个月前,速腾发布了多项可靠性测试视频,包括机械冲击、随机振动、高低温运行、高压水冲击等 DV(Design Validation)测试项目。
根据官方信息,速腾聚创这台 M1 已于 2020 年 12 月发货交付,同时还建立了年产量六位数的车规级激光雷达自动化产线,预计今年第二季度大规模量产发货。
这有可能是全球最快量产交付的高性能车规级激光雷达。
自动驾驶领域,感知部分的任务就是获得准确可靠的 3D 环境信息。深度学习加单目、三目是无法完成这个任务的。
单目和三目摄像头的致命缺陷就是目标识别(分类)和探测(Detection)是一体的,无法分割的,必须先识别才能探测得知目标的信息。
而深度学习肯定会出现漏检,也就是说 3D 模型有缺失。
因为深度学习的认知范围来自其数据集,而数据集是有限的,不可能穷举所有类型,因此深度学习容易出现漏检而忽略前方障碍物。
如果无法识别目标,单目就无法获得距离信息,同时系统还会认为前方障碍物不存在危险,不做任何减速,特斯拉多次事故大多都是这个原因。
只要用了激光雷达,安全性就有压倒性优势。
可以说加入激光雷达的 Lucid 稳赢没有激光雷达的特斯拉 FSD。
这与算力无关,传感器才是最关键的源头,源头数据不够冗余可靠,下游算法做得再好也没用。
随着激光雷达技术成熟和成本降低,L2 以上的系统都会使用激光雷达,特斯拉也有可能采用。
从三电系统的设计挑战车辆的物理特性,到激光雷达大幅提升自动驾驶的软件性能,这两大设计已经成为 Lucid 搏杀特斯拉的秘密武器。
随着各大车企的三电系统设计演进,以及众多车企纷纷选择配有激光雷达更高规格的自动驾驶系统布局,那个赋予人类出行安全与环保最高期望的智能电动驾驶时代正加速到来。
来源:第一电动网
作者:汽车之心
本文地址:https://www.d1ev.com/kol/141777
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!





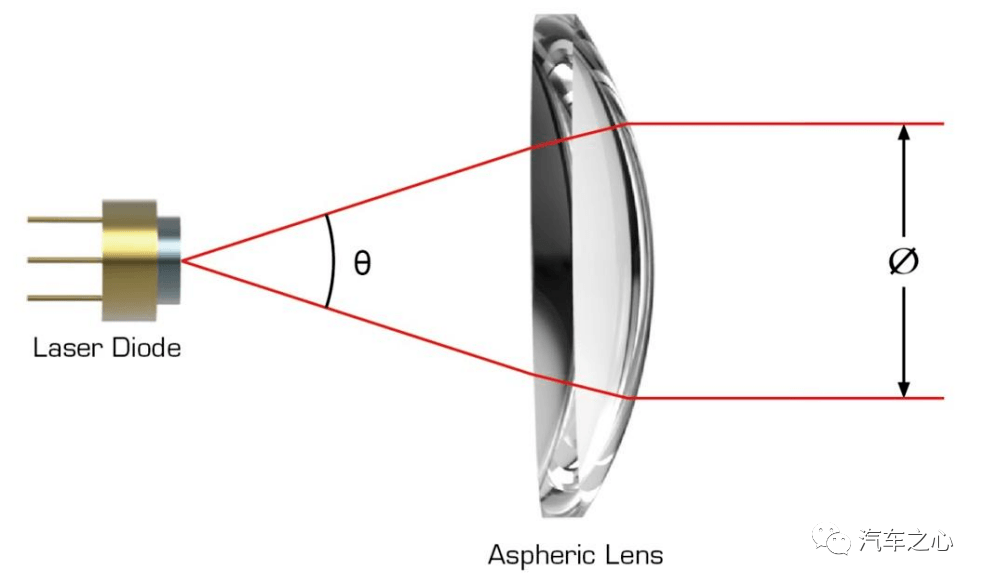 准直透镜示意图
准直透镜示意图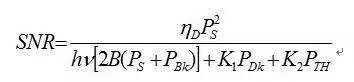











 京公网安备
11010502033163号
京公网安备
11010502033163号