编者按:
【春节前,小鹏P7就要推送NGP(自动导航辅助驾驶)功能了,这是最近汽车圈里的热点话题。
这两天,资深小鹏车主大包子狸去体验了一把NGP。他在这篇万字文章中,详细讲述了整个体验过程,对NGP做了一个系统评述,指出4大优点和10大缺点,也讲了自己的真实感受。
我们觉得他的评述很全面,值得一看。经他授权,转载于此,与大家共同分享。】
01
前言
知乎惯例,先说结论:真香,但并不完美!小鹏科技,何止于车!
下面开始慢慢说,全文看完大概超过10000字,图片50+,后期再更新当时的视频剪辑。
1月11日起,小鹏汽车在广州发起了智能体验营活动,开放了旗下智能音乐轿跑P7的NGP Beta版的体验。很有幸大包子狸参加了这一体验,结束后的短暂时间里,问我的感想,只能是“卧槽”。一觉睡醒,整理思路,大致分下面4个部分说说这次的体验。
1. NGP介绍会详解
2. NGP体验全过程
3. NGP的优缺点
4. Q&A
02
NGP介绍会详解
大包子狸到达位于广州机场旁的智能体验营,在前期的体验营里,各路媒体和专业老师先后体验了NGP,在网上也可以看见各类测评,感觉今年小鹏宣传力度加大了很多,各个媒体都可以看见相关的测评。在体验营的前面墙上,看见了个人最喜欢的一位知乎大V@张抗抗,毕竟“常岩说的好,抗抗说的对”,我个人还是更喜欢说的对,唉,红果果的直男思维。
在活动开始之前,首先是小鹏汽车自动驾驶中心总监黄鑫给我们讲解了NGP Beta版的前世今生。着重讲解了NGP的自动驾驶硬件、软件功能、相比同类功能的优势场景,自动驾驶行业现状、工程版和Beta版的不同,NGP人机交互体验的进化,NGP行驶安全的进化,领航辅助类功能评价标准的发布,本次体验路段说明等,大概内容如下:



(1)自动驾驶硬件。这点应该很简单了,P7拥有目前量产车中最强的自动驾驶硬件,用毫米波雷达和摄像头构成了两套360度感知体系,通过视觉和雷达两套系统形成了互为补充的感知体系,比如在视觉受限的诸如强光、黑夜情况下,有效通过雷达信号融合提升感知的有效性和可靠性。
再加上英伟达量产的最强自动驾驶算力芯片和以太网的车身数据结构,为高效梳理数据提供了强力保障。再加上厘米级的定位能力和分米级的高精地图,为NGP提供了上帝视角的预知能力,有助于车辆在大曲率弯道、施工路况等各种情况提前做好准备。
这里有个有意思的地方,值得大家注意,黄总监介绍到,目前市面上发布的车辆有很多提到了自己也拥有高精地图的能力,但是并没有介绍自己的定位能力,这将有可能影响实际用户体验,因为虽然你拥有了预知周边各种情况的能力,但是你并没办法搞清自己在哪里,自然也就很难做出下一步的判断。
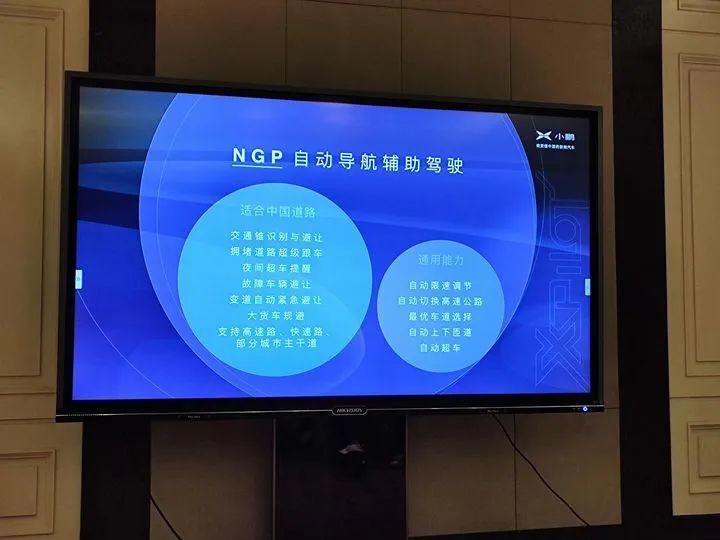
(2)NGP自动导航辅助驾驶功能。在这一块,分为两个部分,分别是通用能力和更懂中国能力。通用能力相对来说比较简单,主要包括了自动限速调节、自动切换高速公路、最优车道选择、自动上下匝道、自动超车。这些功能大家应该比较熟悉了,就简单给大家介绍下:
自动限速调节:按照高精地图和地面交通标志的信息,自动调整车辆的行驶最高速度,比如在正常路段保持时速120公里,在隧道保持时速80公里,在匝道保持时速60公里。
自动切换高速公路:这个就是根据导航路线,从现行的高速公路切换到其他高速公路,主要要求车辆对提前进入匝道,并识别应对切换路口多个匝道和复杂车流的能力。
最优车道选择:是指车辆在高速公路上,主动进入车辆较少的左侧超车道或者行车道,保持一个相对高速的行驶环境。
自动上下匝道:是指在高速过程中各种匝道进入和开出的车辆应对场景,尤其是大曲率弯道匝道带来的困难。
自动超车:说的是在行驶过程中,遇到前方慢车,我方车辆可以自动识别并自主完成识别并变道超越慢车后回到原来选定行车道。
在更懂中国能力部分,应该是这次NGP体验的重点,这部分主要包括了交通锥识别与避让,拥堵道路超级跟车,夜间超车提醒,故障车辆避让,变道自动紧急避让,大货车规避等。
交通锥识别与避让:因为中国的交通道路特性,高速公路上施工情况时有发生,雪糕筒,水马,圆柱筒等警示标志各色各样,小鹏自动驾驶团队针对这些场景做了大量的数据采集,NGP已经拥有了可识别可避让的能力,可以做到识别、发出警告、自动规避的能力。
拥堵道路超级跟车:指的是在道路拥堵的情况下,车辆将通过全向感知能力,全力保持和前车的距离,通过对侧方车辆的监控和预判,避免侧方车辆“加塞”的能力。
夜间超车提醒:指的是在NGP在夜间实施超车的场景中,会自动闪烁大灯,提醒被超越车注意后方来车。
故障车辆避让:说的是在道路前方存在车辆应为故障无法移动,NGP将提供警示和避让的能力。
自动变道紧急避让:指在车辆变道过程中,一旦车辆发现目标车道后侧有快速来车,我方车辆将会自动取消变道,退回到原有车道待机再次执行变道任务。
大货车规避:这点比较重要,指的是按照人类驾驶习惯,考虑到大货车场景给驾驶人员和乘客带来的不适感,为车辆增加了特别优化。这并不仅仅是一个和大货车并排时候靠左行驶,还有更多其他场景,诸如提前变道规避,变道时候规避面向大货车变道等等。

(3)相比同类型功能的优势场景。在这一块,主要是结合场景环境,告诉用户终端体验上,在哪些场景可以明显的感知到NGP等能力优势,主要是以下三个场景:雨天、大曲率弯道、大货车场景。
雨天:在雨天乃至于大雨场景,传统的视觉系统会受到严重限制,但NGP有效的将毫米波雷达感知能力和视觉感知能力进行强力融合,大幅度提升自动辅助驾驶的能力,这一点其实在G3上已经初见端倪,大包子狸以前在大雨中测试过G3的LCC+ACC的能力,表现出了较强的保持能力,在这里必须强调的是,G3并无法保障雨天情况下自动辅助驾驶的安全,驾驶员务必保持高度警惕,随时准备干预车辆,确保行车安全。
大曲率弯道:大曲率弯道一直是特斯拉的优势,特斯拉AP阶段的车道保持能力惊人,小特叔叔测试特斯拉时候发现了著名的“小特弯”,凭借着稳如老狗的过弯方式,AP无愧于拥有最强车道保持能力。这次小鹏在NGP情况下,将高精地图有效融入,实现了对大曲率弯道的预知,配合现有的车道感知能力,可以实现大曲率弯道的有效应对,最大限度避免了匝道过弯退出的情景发生。
大货车场景:这一点上面已经说了不少,在这里就不重复了,主要就是不断的提升各种因为大货车并行给驾驶人员带来的不适感和危险感,比如遇到超宽大车车载货物大于车身本体的情况,又比如遇到货车蒙布绑定不牢带来的晃动,又比如雨天大车溅起的巨大水雾……这些场景都将做不断优化和提升。
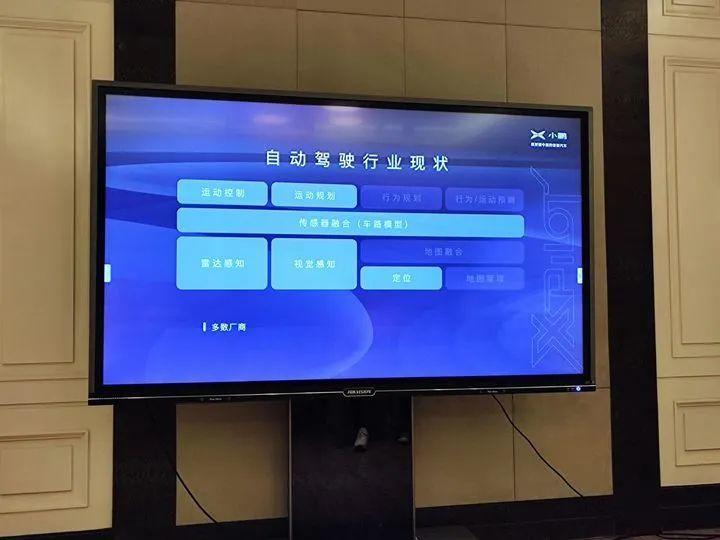
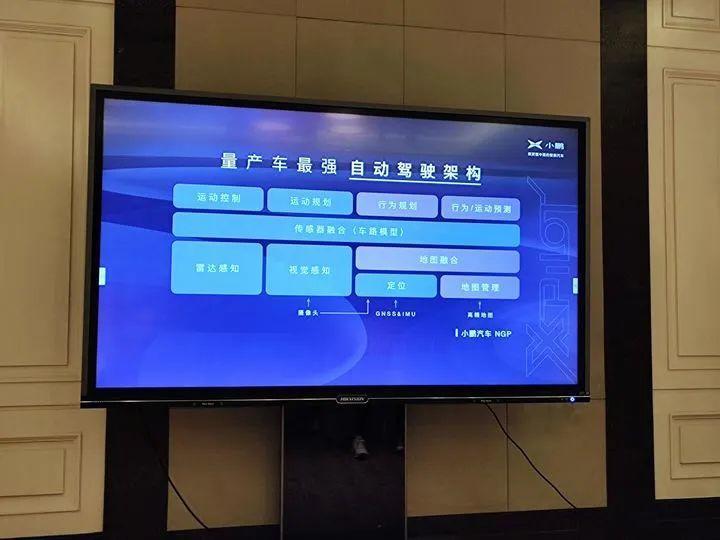
(4)自动驾驶架构的不同。这一段主要是介绍了自动驾驶行业现状以及NGP的架构优势在哪里。这里涉及很多比较专业的部分,简单的说一下,目前市场上大量的车辆都采用了供应商方案,由诸如M家的自动驾驶供应商提供解决方案,这就包括了从摄像头+雷达提供感知能力,并通过传感器融合后对车辆进行运动控制和运动规划。
这种方式最大的优势就是简单低成本,只要购买了方案,相当于给现有车辆加装一个模块,从硬件到算法都是供应商提供,而且因为简单重复数量大,成本可以得到有效控制。但缺点就在于严重受制于供应商,后续的优化和针对自己的情况想要做出变更,都非常困难,因为供应商针对太多主机厂,无法针对性修改推送。
小鹏的优势就在于增加了高清地图和高精定位,将地图融合能力融入传感器融合中,并且因为全栈自研的优势,可以有效针对自己的需要,对算法做出开发和修改,为车辆增添了行为规划和行为预测的能力。这就好像原来说的超级拥堵跟车辅助,通过摄像头的数据对监控车辆的行动进行规划和预警,并操作车辆进行前行等操作。这就是所谓的运动行为预测的能力。所以,小鹏NGP的最大优势就在于可以提前用上帝视角来获知很多信息,并提前做好准备,所谓心中有数,应对不慌。
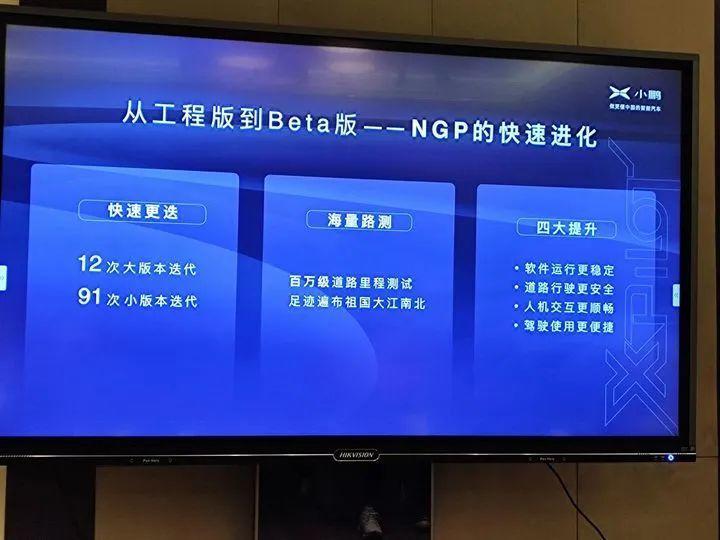
(5)从工程版到Beta版的不同。这里主要是版本迭代、海量路测和四大提升三个部分。
版本迭代:从1024智能日发布了工程版到今天的Beta版,80天的时间里,该版本历经了12次大迭代,91次小版本迭代。在后期和工程师的交流中,我们知道5+2,白加黑的开发过程中,几乎每天都在不断的优化NGP能力,并不断发布新版本进行实车测试。
海量路测:这个就很简单了,就是NGP已经经过了百万公里级的现实道路测试,但这种测试并非是在单一路况下简单重复测试,而是在全国范围内不同的道路进行广域测试,所谓走遍祖国大好河山。这一点决定了NGP是在大多数高速公路、高架和快速路是实际可用的能力,而不是少数道路范围内炫技使用的能力。
四大提升:这里主要是软件运行更加稳定,道路行驶更加安全,人机交互更加顺畅,驾驶使用更加便捷。其中软件稳定和驾驶使用更加便捷的意思大家能直接理解,就不多说了,主要来看看人机交互和驾驶安全。

人机交互方面:这点要说的是,Beta版本提供了一个非常优秀也是独一无二的SR界面,提供了非常清晰的现实情况模拟,非常清晰的告诉你,车在哪里,车看到了什么,车下一步将往哪里去。并且在非常多的场景下都增加了显示和语音提示,比如下一步要超车了,比如要进出匝道了,让你了解车辆的下一步运行意图。在遇到复杂情况下,车辆也会发出预警,并详细描述预警原因和建议操作,比如告诉你,道路表现不清晰,请小心。在人机驾驶之间建立了明确的界限,比如通过语音,车机显示、安全带等多种方式融合建立了多级提示机制,更清晰的标明了人驾和车驾的界限。

行驶安全方面:首先是提供了预告能力,因为高精地图的引入,由于拥有上帝视角的能力,车辆会把诸如施工、收费口等信息提前告诉用户,给用户预留较大的准备时间。其次是提供了实时预警能力,比如感知到下雨、前方事故等也会立即提示驾驶人员。
最后则是高效,这里要说的是著名的高速结束的退出匝道功能,目前的系统逻辑下几乎所有的领航辅助功能都设定了一定的阈值,比如提前2公里向右变道进入匝道,或者提前3公里进入匝道,这个阈值都是固定的,但是在显示情况中会遇到各种各样的问题,比如高速公路出入口严重拥堵,堵车就堵了3公里,然后系统设置提前2公里,就会造成几乎无法完成变道。
对此,小鹏正在研究通过地图实时数据,进行判定,比如当地图显示高速出入口拥堵2公里,那么出入匝道NGP就会在此基础上再提前2公里开始执行进入匝道操作,确保操作成功和车辆顺利进出匝道。
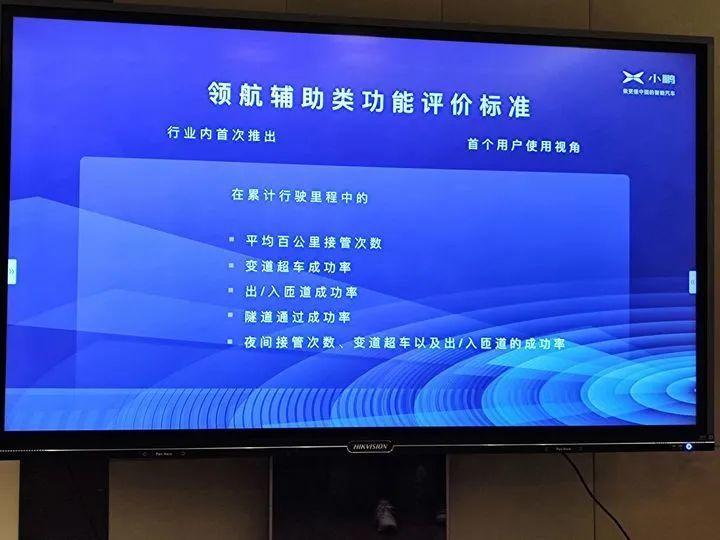
(6)发布领航辅助评价标准。一个领航辅助功能到底好不好,用什么样的标准去评价,目前行业内还没有一个明确的标准,这次小鹏也探索者发布了全新的评价标准,主要是五个指标:平均百公里接管次数,变道超车成功率,出入匝道成功率,隧道通过成功率,夜间接管次数、变道超车以及出入匝道的成功率。这个评价标准有个大包子狸很喜欢的地方,就是他完全是站在用户的视角和实际使用的场景来设置的,当然这个评价标准还比较简单,以后可以进一步细化。
但是大包子狸想强调的是,因为视角和场景实在是太重要了,就说一个简单的案例,比如自动泊车,其实在2010年自动泊车技术在量产车就商用了,但是为什么到2019年G3的发布才带来自动泊车的高潮,就是因为G3解决了从能不能用到好不好用的问题,在多个场景下都可以使用,使用时候不需要频繁操作,真正实现自动泊车更轻松、更方便、更迅速。这样的情况下,自然都做到大家都来使用。今天的NGP也是一样,如果只是在很少的场景能用,用起来总是需要干预,就会体验很一般,用户也不会去使用。所以,小鹏此轮这个标准将会很好的去对这些功能进行评价,看看这个功能到底是不是会有现实的实用意义。

(7)NGP使用资格测试。因为领航辅助驾驶功能并不是完全的自动驾驶,为了避免造成使用人的误会带来行车危险,小鹏P7上在使用NGP的时候是需要对用车人账号进行相关测试的,大致的过程是看一个小视频,然后回答相应的问题,通过问题回答之后,可以获得使用NGP权限,这个考试是随账号的,也就是你通过了测试以后,你无论在哪台拥有NGP能力的车上都可以使用NGP功能。
这个功能大包子狸个人感觉好评,因为现在已经有太多因为错用自动驾驶辅助功能而造成行车安全事故的案例了,一方面给车主自身安危带来巨大影响,另一方面给也威胁到他人安全和社会秩序,在这么多车企里,小鹏能够通过这种强制性测试的模式,加强对安全的把控,是一个非常好的措施,点赞!
03
NGP体验全过程
在详细了解介绍会的内容后,终于到了刺激的体验环节了,首先是教练介绍了测试路线和一些注意事情,然后介绍了分车情况,我们这次是2个人1部车进行体验,在行程过半的时候有个服务区可以换手。


简单的分组之后就来到了试驾车的停车场地,在这里12辆试驾车已经整装待发,南方和美的阳光下的P7发出略带金属色的光泽,彰显出完美的科技感,车身侧面“智能体验营”的大字配合简单的几何图标表现出极简的科技气息,执行公司的教练等在车旁,NGP终于就要来啦!

上车之后,首先是教练简单的介绍了一下NGP的开启方法和使用时候的安全事项,以及在体验路段可能会遇到的一些问题、关注焦点,并按照NGP的要求,设置了目标地址并开始导航,因为只有在设定导航节点之后,车辆才具备进入NGP的能力。然后大家系好安全带,这就准备出发啦。

车辆出发以后,首先是教练开车,我们试乘,教练在经过一段市区道路行驶之后,很快来到了高速的入口,在这里教练再次确认了导航的目的地,然后就开上了高速,进入高速以后,可以看到在中控的地图界面左上方出现了灰色的NGP标志,出现这个标志就代表着目前的路段拥有NGP的使用能力,此时,教练使用右侧拨杆快速向下连续拨动两次,车辆语音自动提示:进入NGP状态,刚才的灰色图标也点亮为蓝色图标,中控屏上出现NGP的SR界面,车辆前方出现一条类似特斯拉NOA的粗壮的蓝色导线。此时,就正式进入了NGP状态。


体验中,我们遇到的第一个场景就是车辆自动进入最优车道,我们启动NGP的时候,其实是在道路的中间车道,当车辆在该车道内行驶了一小会之后,语音提示:即将向左侧变道,然后中控屏也出现了文字提示,SR界面上蓝色导线开始向左侧偏移,并且在目标车位出现白色透明车位,方向灯自动点亮。然后大概在提示后的三秒内,车辆迅速向左变道,过程干净利落,不带任何犹豫,变道完成后自动关闭方向灯,车辆进行保持向前行驶。

我们遇到的第二个场景则是自动超车,当时我们行驶在最左侧车道,前方有慢车,右侧是一辆大货车,在前车超过大货车以后,大货车开始向右侧车道变道,空出了中间车道。此时车辆检测到前车慢行,右侧存在空间距离,语音提示,即将向右侧变道,然后中控屏也出现了文字提示,SR界面上蓝色导线开始向右侧偏移,并且在目标车位出现白色透明车位,方向灯自动点亮。然后大概在提示后的三秒内,车辆迅速向右变道,和上次不同的是,因为这次前方有慢车且目标车道侧后方有跟车,P7在变道过程中采取了人类驾驶员常用的加速变道模式,就是在变道的同时适当的增加速度,保持和目标车道后方车辆的安全距离。而且这个场景也证实了P7具有右侧超车的能力,有效预防了超车道始终跟慢车的场景发生。

遇到的第三个场景就是锥桶识别,在距离我们两个车道外的紧急停靠带因为施工布置了大量的雪糕筒,P7均能准确识别,并在SR图上准确的用图像标记出来,并提前在中控屏上给出小心施工的警告,因为我们并没有走在施工所在的道线,所以也无法体验出是否会自动规避。

遇到的第四个场景是进入匝道,当车辆地图显示还有2公里即将进入服务区的时候,车辆开始自动向最左侧变道,变道的过程和上面的基本相同,先完成一次变道之后,再完成下一次,一直到进入最右侧车道。这里有个小细节就是在进入最右侧车道之前,我们的车检测到最右侧车道前方有一个大货车慢行,我们的车是加速超过了大货车之后,再变道进入了最右侧车道,这对乘坐体验和交通效率相信都会有提升的益处。
但是在距离匝道1公里之内且车辆已经进入最右侧车道后,车辆会在80公里最大时速范围内跟车,不再会自主发起自动超车。并且在1公里的时候语音提示,还有1公里即将退出NGP。在距离服务区还有500米左右的时候,车速进一步降低到最大时速60以内,在距离服务区还有250米的时候,车辆开始自动变道进入匝道,并通过中控闪烁警示画面,提供退出NGP还有XX米的提示,语音也在反复播报还有XX米即将退出NGP。在进入匝道后,中控屏会变化成一个完全要求接管的手握方向盘画面,语音发出警报音,安全带反复勒紧驾驶员,提醒驾驶人员立即接管车辆。

到了服务区,换了同车鹏友驾驶,先是照例进行手机APP测试,然后上车开始继续体验。也是陆续体验了自动进入最优车道,自动超车,体验到另一个不同的场景就是自动切换高速,在快要进入目标高速匝道路口2公里处,车辆还是和上述情景的一致开始逐渐自动变道进入最右侧车道,但是接近道口的时候,你会发现这个路口存在着切换匝道然后立即一变二的路况,就是进入匝道以后立即要尽量两条分路的选择,进入了分路之后遇到一个曲率尚可的弯道。在实际体验中,车辆能够快速进入匝道,然后立即在中控中显示出车辆将要进入的匝道,并自动进入,这种精确的车道级导航就避免了我们平时手机导航的那种开到道口前面不知道往哪里开的尴尬。

体验到的第六个场景是汇入主路。在刚才的匝道下来之后,我们首先遇到了匝道进入主路前有一段道线不清的情况,然后汇入主路后后方有较多来车。我们体验下来,车辆在道线不清晰的路段能够保持车身稳定前行,并不会出现晃动和画龙的情况,汇入主路过程中,能够在目标车道的后方来车超越自己的短时间内迅速向目标车道加速变道,并保持和后车的安全距离。

体验到的第七个场景是隧道。在隧道前,车辆开始自动降速,但是这里有一个问题,现场的道路限速牌提示这个隧道的限速是100,车机导航地图提示这个隧道的限速是80,车辆最终选择了80的限速去通过隧道。在隧道内,车辆行驶稳定,地图定位准确无任何偏离。

体验到的第八个场景是调节速度进入匝道。当时我们遇到了这样的路况,还有2公里即将进入匝道,我方车辆行驶在最左侧的车道上,右侧目标车道上前后都有车,我们车辆先是自动减速,让前车拉开距离,然后在加速超越后车并迅速变道,随后再次变道进入最右车道以便于进出匝道。这个逻辑显示了相当先进的AI智慧,已经完全类似于人类驾驶员的操作水平,通过调节自己的车速来来开目标车道之间的空隙,然后实施超车,当时确实有点惊到我了。

第九个场景是非常刺激的大曲率弯道。这是一个高速切换场景中遇到的180度大曲率弯道,车辆在进入弯道前,语音和中控屏都发出提示:小心急弯。然后车辆逐渐减速进入弯道,从50不到的速度一直缓降到35左右的速度来配合过弯,在曲率最大的时候,系统牢牢控制方向盘到最适合倾角,保证车辆保持在车道正中,避免过于贴近弯道边缘带来紧张感。在出弯道的时候,车辆开始逐渐加速,在汇入主路前已经提升到了60左右。这个弯道过的非常完美,车辆不仅成功过弯,而且还会减速入弯,加速离弯,已经有了老司机作派,这样的过弯能力的确已经可以和搭载特斯拉相媲美了。

第十个场景就是变道自动取消和再次启动。在行驶过程中,我们的车辆触发了自动向左变道并开启了方向灯,但这个时候,后方跟车加速前行并迅速变道超车,这就造成了该车路线和我们车规划路线重合,这个时候NGP自动关闭了变道指令,车辆关闭信号灯继续向前行驶,但问题来了,前方即将遇到长实线。我们本来以为车辆将要在长实线后再执行变道了,没想到车辆迅速果断的执行了一次加速变道,完美的在实线前进入了快速车道。这个也要非非常好评,因为在我以前体验过的部分领航辅助驾驶功能中,当车辆开始变道后,一旦发现暂时无法变道后,车辆就会打着方向灯一直等待变道机会,这就给目标车道后方司机带来比较大的困扰,他让你吧,你又不变。不让你吧,又怕你打着灯突然变过来。这样的情况在某些场景下严重影响交通通行效率。NGP的这种操作确实在提升用户体验的情况下,进一步提升了交通参与者对整体交通效率的提升。

第十一个场景就是施工造成的地面道线混乱。在体验过程中,我们遇到一段路况是因为施工,地面导线重绘,旧的导线又没有清楚干净的情况,在这种路况下,NGP可以继续有效引导这辆在正确的道路内行驶,并不会因为地面导线的变化和混乱造成车身的不稳定或者摇摆给驾乘人员带来不适。

第十二个场景则是我们体验形成80公里中唯一一次人工干预场景。这个场景的情况如下:在进入一个大曲率弯道的前,我方车辆始终跟车前行,在弯道口前车突然实线变道离开弯道,我方车辆从30多速度加速到45左右进入弯道后再次降速并大角度回旋方向盘,但是车辆速度降低未及预期,有和周边护栏碰撞的危险,显示屏和语音发出立即接管信号,安全带勒紧驾驶员提示警告,在这种情况下,我立即接管了方向盘并轻踩刹车退出NGP功能。在这个体验下我并不知道是否极限工况是否会造成事故,但是处于安全考虑还是应该立即接管,确保行车安全。
最后再说下体验的一些综合感受,我们整个试驾的时间基本和导航所限定的时间相同,这也就是说全程使用NGP的情况下,并不会很大程度的拖慢你的通行效率,这点也要好评,这也再次说明了小鹏打造这个NGP这个功能立足点就是有实用性,只有在保证通行效率的情况下,NGP才会被越来越多的人接受和使用。另外,NGP全程的交互、体验都比较友好和便捷,应该是使用过的最容易上手的辅助驾驶系统了,基本的体验全过程大概就是这样,
04
NGP的优缺点分析
说到NGP的优点,其实上面的体验过程中已经说了很多,因为前期各位媒体老师已经通过文字、视频等多种方式吹爆了NGP的体验,大家可以很简单了解到很多NGP的优势,大包子狸体验后和小鹏两位自动驾驶工程师交流了挺长时间,就简单的归集几个要点:

(1)理念上有领先。小鹏工程师提到,在他们这个项目立项之初,就设定了要做更懂中国的自动驾驶,要在中国范围内占据领先优势。所以这就决定了在硬件设计和软件研发目标上有更好的前瞻性。

(2)硬件上有冗余。在感知系统上,硬件设立了两套360度的感知体系,并设立了大算力平台和独立的大屏算力能力。

(3)软件上接地气。因为中国的道路工况和欧美有很大区别,比如美国基础道路建设相对比较成熟,可能很长时间都没有大规模的变化,高速车流比较规则,而且对交通规则的遵循度比较高。而中国的高速公路几乎每一天都在施工,不同的施工情况层出不穷,而且道路建设日新月异,几乎每年各种道路情况都发生变化。所以小鹏的软件团队诸如NGP针对中国的特色做了更多的开发和细化,在中国场景使用更有优势。在这点上很好理解,就是类似于我们的手机,一开始摩托罗拉和诺基亚都非常先进,但是随着国产智能手机不断提升,本地化应用诸如小米智能生活、微信、支付宝和京东之类的生活环境越来越成熟,国产品牌自然就慢慢获得了市场和用户的认可。
(4)升级上有交互。类似于小米的MIUI的设计,用户在使用过程中产生的各种数据,通过神经网络和大数据技术反复喂养和训练,不断提升。比如在NGP过程中系统发现在哪些情况下会被人类驾驶员接管,然后进一步分析为什么会产生这样的情况,然后进一步去改进自己的系统,从而做到更加好用。比如在我们试驾过程中,我们发现部分驾驶人员喜欢相对激进的变道方式,部分驾驶人员喜欢相对保守的变道方式,或者有的人自己开车的时候喜欢激进,有家人在车上的时候喜欢保守。我们就把这样的建议提交给了自动驾驶团队,他们也表示会在后期的OTA中融入这一功能。一个可进化的系统,常用常新谁不喜欢呢?!
NGP的优点就不多说了,主要来说说NGP Beta版本体验过程中感触到的几个不足。

(1)仪表盘显示单调。在开启NGP的过程中,仪表盘除了一个NGP图标之外,没有任何提示,甚至连原来LCC的两条蓝色标线都取消了。这样就会造成一个错误场景,当车辆提示请紧握方向盘,驾驶人员不知道自己紧握的力度是否会造成NGP退出,看向仪表盘的瞬间发现和平时自己驾驶没有特别大区别,会误以为已经退出NGP状态,从而立即接管驾驶,反倒真正退出了NGP状态。此处建议是否可以考虑把类似于中控屏上的一条蓝线加入仪表盘的NGP状态。

(2)仪表盘无法显示侧后方来车。在NGP状态下,中控屏上可以显示车辆周围360度的车辆情况,但是如果驾驶员切换到地图、音乐界面无法观察SR界面的时候,仪表盘的模拟情景并不能和特斯来或者蔚来那样显示侧后方来车的情景,还是和以前一样智能看到前方和侧前方情况,建议增加侧后方路标显示,提升驾驶安全性。
(3)中控屏部分提示存留时间较短。在驾驶过程中,由于驾驶员大多长时间看着前面的路况,通过语音或者眼睛余光感知到中控屏幕的提醒时候,可能并没清晰的感知到提醒的内容,然后再低头去看的时候提醒已经消失了。建议延长提醒的存留时间。

(4)对于路面出现坑洼或者杂物(如前车掉落保险杠)等情况无法感知。在这种工况下,车辆暂时无法识别并做出判断,需要驾驶人员进一步提升观察,避免引发各种意外。

(5)高精地图和现场感知出现矛盾。我们本次通过一个隧道,高精地图上显示的是限速80,但是现场标识上表现出的是限速100,在这种相互矛盾的情况下,系统将会如何做出判断?我们感知下来似乎是高精地图的优先,因为车辆毕竟按照最高限速80去实际行驶的。

(6)SR渲染还不完善。在我们通过一段施工路面,其实路面已经因为施工缩紧到单车道行驶,周围的其他车道上已经用水泥墩进行了物理硬隔离,但是在渲染图上并无任何标志,依然显示的是正常的行驶路面。虽然在该路况下,车辆实际已感知到右侧车道不可用,不会执行任何的向右变道功能,但是处于人家交互和驾驶信心感知的考虑,还是希望在渲染图上做进一步改变。

(7)降级设计隐藏较深。在开启NGP的情况下,如果因为车队驾驶或其他原因想要退出NGP保持LCC状态,这一降级操作的操作按钮相当的隐晦,非常难找。导致大多数驾驶员需要首先退出NGP状态,然后关闭NGP功能,再启动LCC,操作复杂,长时间目光聚焦大屏,增加高速行车过程中的安全风险。

(8)车内摄像头用处不明。在Beta版本中,车内摄像头似乎没有发挥任何作用,按照设计,当驾驶人员更换的时候,车内摄像头通过人脸识别可以直接识别人员,并切换账号,但在体验过程中并未发现类似情况。在驾驶过程中,车内摄像头针对驾驶人员的监控功能也未体验,并未出现任何提醒驾驶人员目光已经离开或者疲劳驾驶的提示。

(9)NGP状态下电能规划缺陷。当车辆导航路程超过续航后,NGP并不会针对补能做出任何规划,即便是车辆电能已经无法支持线路,NGP也不会自行规划充电线路,作为新能源车,补能规划相当关键,建议在下一步优化里给予考虑。
(10)NGP道路缺乏应有标识。在启动NGP前设置导航目的地的时候,无法提前预知那条路可以使用NGP,那条路不可以使用,这就带来了使用场景下有以下的缺点,比如我要到A地区,我可以选择虽然路远一点,但是可以使用NGP的路段,因为驾驶相对轻松,也可以选择路短一点,但是可以自己驾驶的路段,因为我赶时间。建议类似上面视频中蔚来的NOP,在规划道路的时候做好可以使用NGP的道路标识,并在地图导航内增加选项“尽量选择NGP路段”。
05
Q&A

(1) Q:此轮升级只有NGP么?XP2.5系列的的LCC功能什么时候上线?
A:此轮升级将会打开XP2.5和XP3的全部主动和被动安全功能,包括2.5的LCC功能也会同步上线。
(2)Q:仪表盘是否可以显示后方来车?
A:目前暂不支持。
(3)Q:实线、虚线是否可以做出相应的识别和判断?
A:完全没有问题,车辆感知和高精地图都可以做出识别,并引导车辆做出相应的动作。
(4)Q:对于变道的保守和激进,是否可以选择?
A:正在考虑提供保守模式和激进模式选择。
(5)Q:XP3和XP2.5的LCC会有区别么?
A:会有肉眼可见的区别,比如地面道线混乱的情况,XP3基本没有问题,XP2.5存在一定风险。
(6)Q:城市路面可以全速域开启LCC么?
A:城市路面在15公里以上即可开启LCC。
(7)Q:到底什么时候可以开始推送?
A:春节前,具体时间无法详细到天。
(8)Q:P7以后还有什么功能可以升级么?
A:P7无论是在感知和算力方面,都有很大的冗余空间,我们正在全力开发多个功能,比如最后一公里自动代客泊车等,相信会给大家更好的智能体验。
写在最后:
体验营的时光很快就结束了,通过短短的体验极大的增强了我对小鹏将来发展的信心,尤其是其专注于科技的探索和追求。
说实话,我其实还是蛮激动的,近两年来,多少品牌喊出要对标特斯拉,但是今天小鹏NGP在此刻真的超越了特斯拉NOA的使用体验,我觉得这是历史的一刻。第一步已经迈出了,后面还会远么?
我原来认为小鹏的飞行汽车只不过是彰显品牌调性的炫技,此刻我开始深信其具有的现实意义。我开始相信,在将来,小鹏汽车不仅仅只是一家汽车制造商,更是一个探索无限的科技公司。
小鹏科技,何止于车!

所以,还是得再多进点~下一代中大型SUV,就靠你了!
(本文完)
《电动汽车用户联盟》是一个专注于讲述电动汽车用户的故事,为用户说真话的平台。
来源:第一电动网
作者:电动汽车用户联盟
本文地址:https://www.d1ev.com/kol/136294
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!











 京公网安备
11010502033163号
京公网安备
11010502033163号