近日,小鹏汽车宣布推出X-Mind技术框架,旨在提升
自动驾驶模型的预见能力。该技术通过内嵌预测性世界模型,使车载智能体具备高效的视觉思维链,解决了认知推理与实时计算之间的矛盾,实现了“预见未来”的自动驾驶能力。
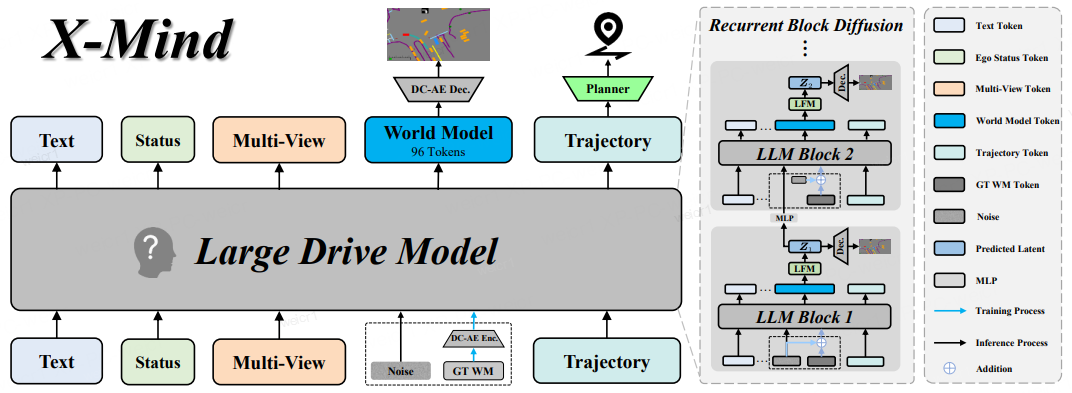
X-Mind技术框架的核心在于将预测世界模型无缝嵌入大型驾驶模型中。通过循环块扩散机制,网络在单次前向传播中执行渐进式去噪步骤,生成紧凑的抽象草图。基于这种预期的物理未来推演,规划器得出最优的自车轨迹。小鹏研发团队将视觉思维链(VisualCoT)实例化,在动作生成之前执行显式的时空推演,使车辆能够像经验丰富的老司机一样在驾驶时提前考虑未来交通流的变化,具备更好的防御性驾驶能力。
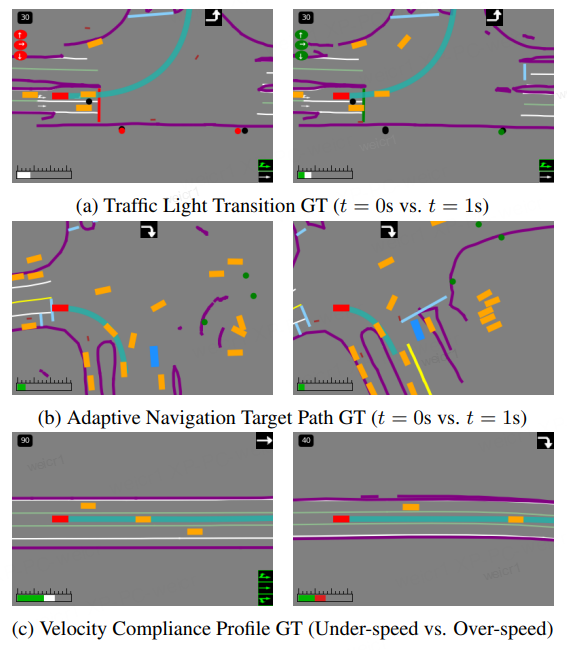
小鹏汽车表示,X-Mind技术框架抛弃了对高清纹理的执着,转而构建了一种融合了鸟瞰图(BEV)布局与抽象驾驶先验的“认知画布”。思维草图包含了物理场景元素、动态交通灯状态、自适应导航意图以及合规车速轮廓等核心语义先验,通过深度压缩自编码器(DC-AE)将未来世界推演压缩至仅96个Token,有效过滤掉与规划无关的纹理干扰,解决了长上下文带来的计算瓶颈。在包含数亿帧真实世界数据的训练集上,X-Mind能够提前推演出障碍物的占位和场景因果链条,显著提升了安全性与合规性。

来源:一电快讯
返回第一电动网首页 >
以上内容由AI创作,如有问题请联系admin#d1ev.com(#替换成@)沟通,AI创作内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网或AI创作,如有侵权请联系邮件删除。







 京公网安备
11010502033163号
京公网安备
11010502033163号