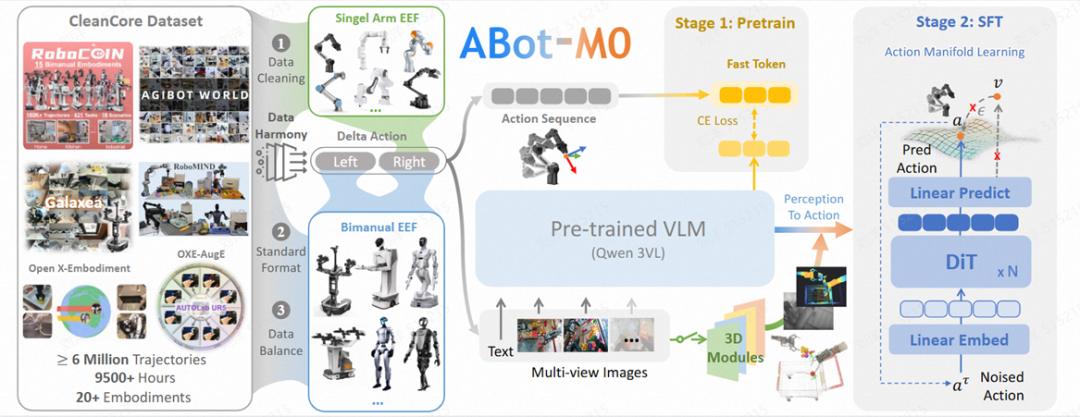
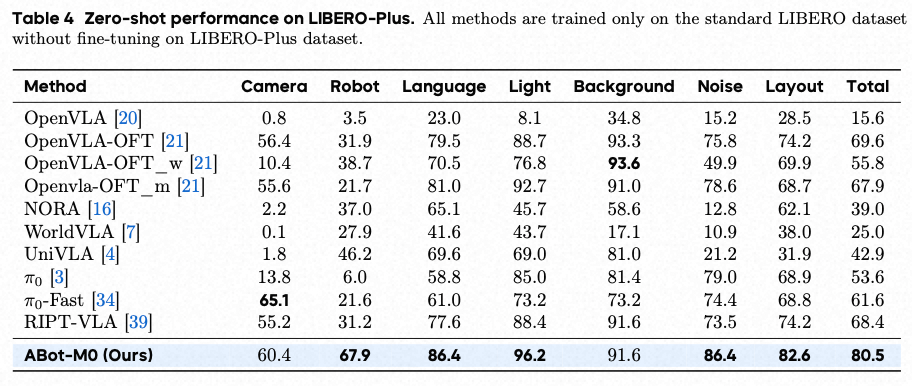
4月1日,高德宣布全量开源ABot-M0,这是全球首个基于统一架构的机器人具身操作基座模型,能够实现一个“通用大脑”适配多种形态的具身机器人。ABot-M0在Libero、Libero-Plus、RoboCasa等多个权威基准测试中达到SOTA(State of the Art),特别是在Libero-Plus基准上,任务成功率高达80.5%,相较于业界标杆方案Pi0提升了近30%。
ABot-M0的开源覆盖了数据、算法与模型三大维度,旨在打破数据孤岛和部署难点,为具身智能领域提供前沿的空间理解能力以及“开箱即用”的通用技术基座。数据层面,ABot-M0开源了规模最大的通用机器人数据集UniACT,整合超过600万条真实操作轨迹,并提供全流程处理管线。算法层面,ABot-M0开源了模型架构与训练框架,包括高德创新提出的动作流形学习(AML)算法与双流感知架构。模型层面,ABot-M0开源了端到端的预训练模型与完整工具链,使开发者能够快速适配工业、家庭等场景。统一架构验证了“一个大脑驱动多种形态”的可行性,为“通用大脑+专用躯体”的产业标准形成提供了实证支撑。
来源:一电快讯
返回第一电动网首页 >
以上内容由AI创作,如有问题请联系admin#d1ev.com(#替换成@)沟通,AI创作内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网或AI创作,如有侵权请联系邮件删除。







 京公网安备
11010502033163号
京公网安备
11010502033163号